 Jacob David C Cunningham
Jacob David C Cunningham
So after I updated the servos from the cheap blue 9G ones to MG90Ds, there was now a startup jitter problem. The servos would flip out and it would take me several times of on/off/on/off... to get the robot to get into the booted state (standing upright).
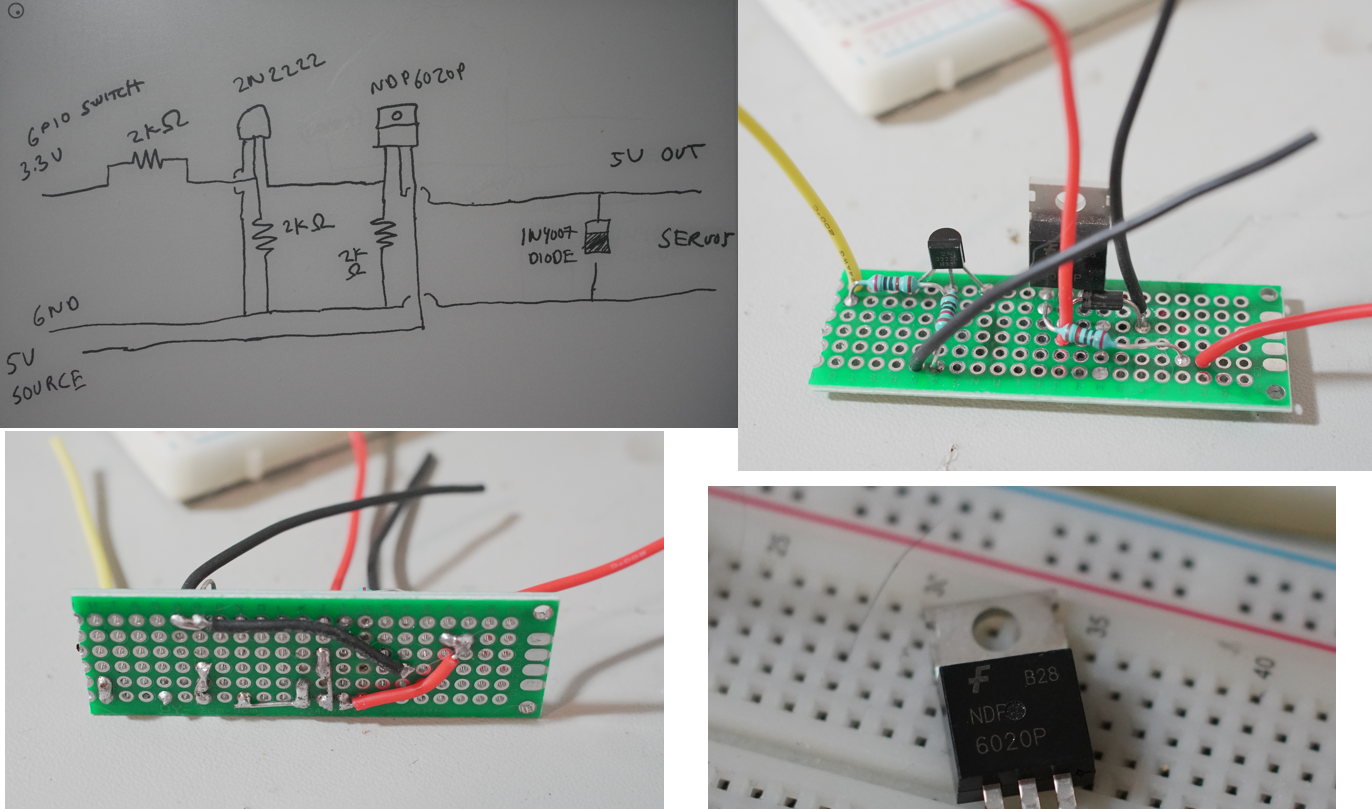
I thought I could fix it by waiting until the Teensy was turned on, then turning on the servos separately, but since everything uses the same power supply, when the servos get turned on, they reset the Teensy and then the Teensy loses control/boots, and that makes the servos go crazy. When you turn the servos on without the Teensy being on, they don't do anything...
But yeah... I wasted like 4 hours rebuilding this MOSFET high-side switch thing and in the end I just used another power supply. Unfortunately (waste) it only powers the Teensy... but anyway it gets the job done, this robot is a learning one/not a great design but I can move forward with this.
I also tried to use super caps in parallel with the power supply I'm using and that was a bad idea (not helpful, too much capacitance, already has capacitance built in). I thought it would provide more current to draw from as a "bank" but nope.
I'm also pleased that the robot can stand up from laying flat on the ground... these servos were worth the money.
I forgot how super slow the TFmini-s sampling is... I'll need to change that, maybe continuously sample and store with markers or something... vs. individual reads for every degree since it takes like 5 minutes to do a scan.
Oh and it's trying to transmit data dang, I forgot what this thing was doing last time I worked on it.
It also failed to transmit all the data since there was no check/acknowledge back from the web to the robot to make sure all data was received.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.