 Ghani Lawal
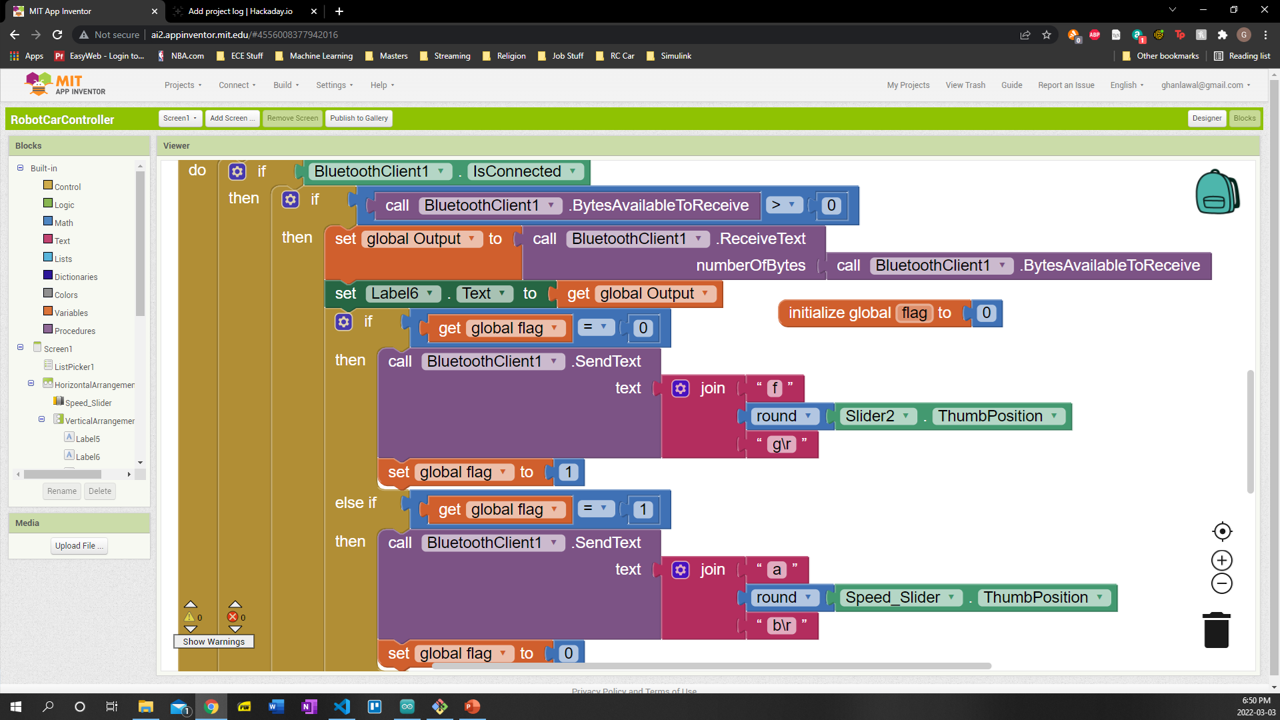
Ghani LawalCan now control the linear and angular velocity of the robot using the phone app via Bluetooth. In order for the velocity commands to be parsed properly I had to increase app time interval to 100 milliseconds to ensure stable connection and switch which command, linear or angular, was sent at every time interval using a flag.



Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.