 Kyle Isom
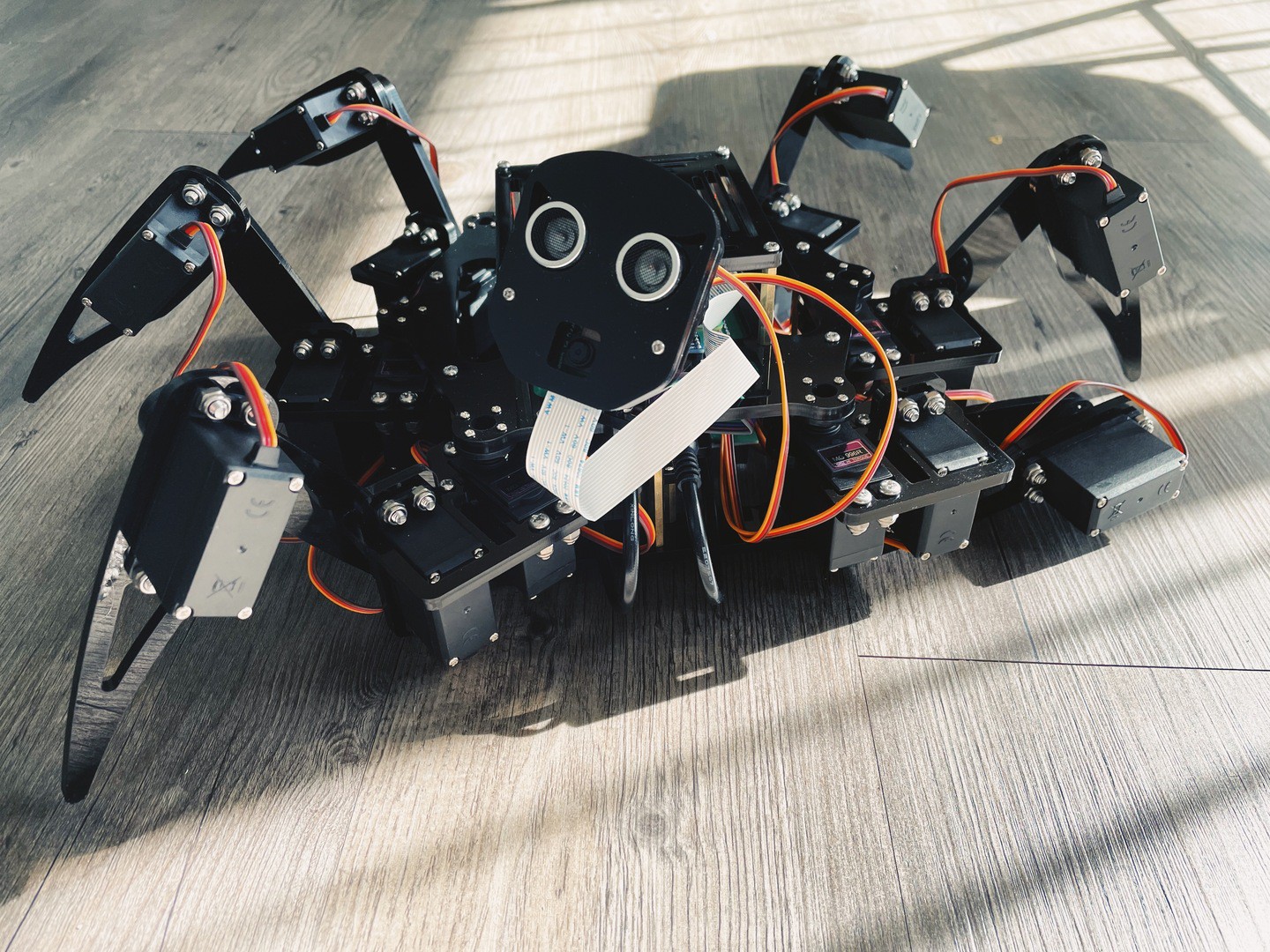
Kyle IsomA little bit more progress on the movement front.
However, notice that the front left leg is having some trouble. I'm noticing that the servos aren't working properly. In the servo calibration code--- which sets all the servos to their midpoint--- that front left servo group works fine. However, when I run the test software, it's not.
I think I need to install ROS and start writing my own control code at this point.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.