 Kyle Isom
Kyle IsomI drew up a quick overview of the qu4druped's orientation. This numbers each leg, as well as the segments and servos in each leg.
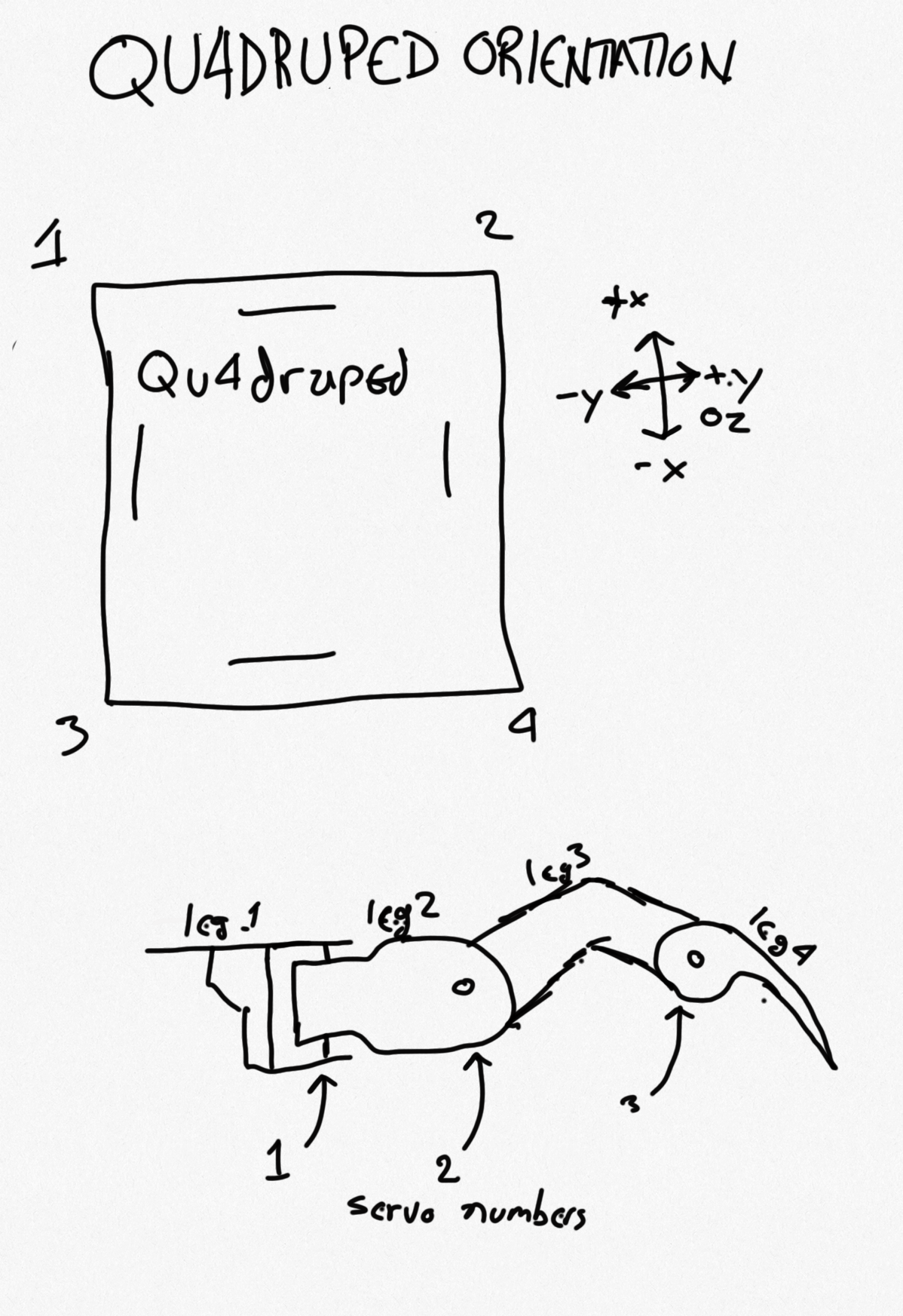
I drew up a quick overview of the qu4druped's orientation. This numbers each leg, as well as the segments and servos in each leg.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.