 pat92fr
pat92frTesting a foot trajectory at high speed using Bezier curve.
I was looking for a smooth swing phase trajectory for my DIY legged robot, that suits a large range of robot velocity (from 0 to 1 m/s and more). This trajectory shall be computed in real time, and should minimize foot velocity and acceleration, and joint velocity and acceleration, in order to get a good tracking and minimal ground impact force at the begining of the stance phase.
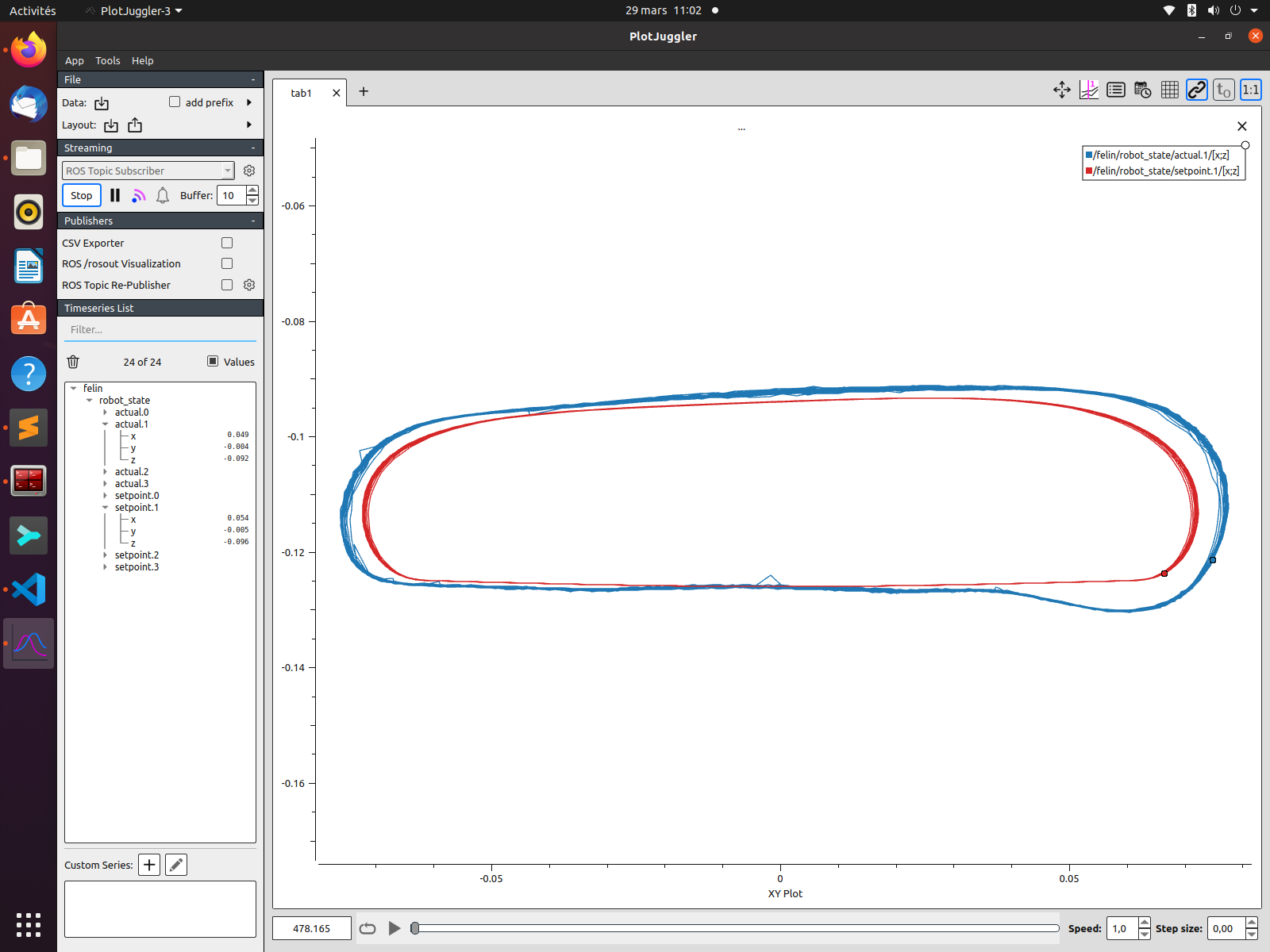
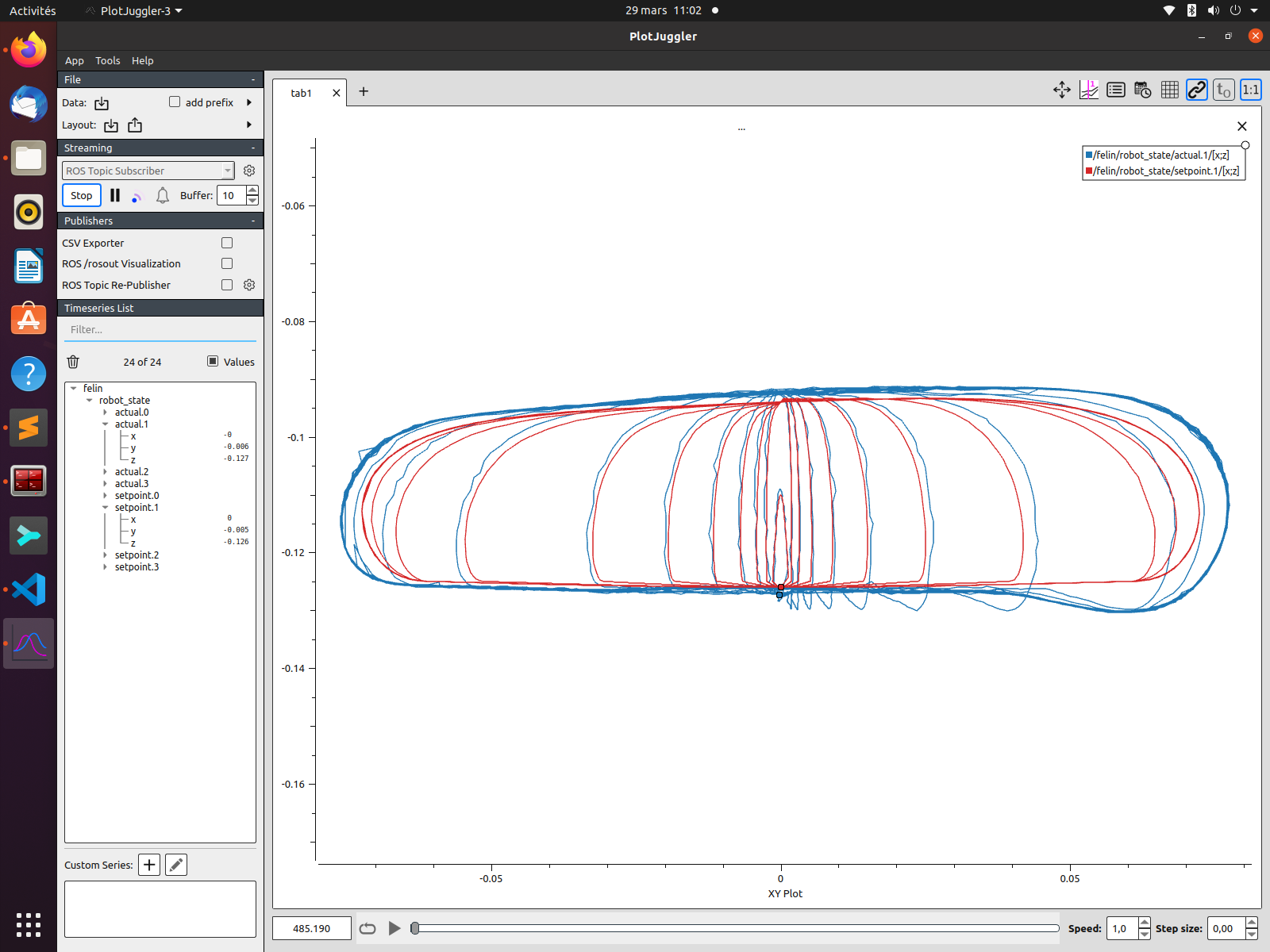
The Bezier curves solution is not yet perfect! There is still a position overshoot at the begining of the stance phase, that could cause a ground impact at the touch down. Foot position tracking at quite a high velocity is not too bad though, and depends on the foot trajectory curve and also on the brushless motor controler setup (Kp and Kd of the position control loop, Kp and Ki of the FOC current loop, FOC implementation). The PID has been set for the a robot walking on the ground, that maybe not be optimal when the robot is not in contact with the ground. Well, that require further analysis, but those first experiments are interesting.
Git : https://github.com/pat92fr/FootTrajectoryPlanner
Patrick.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.