 Ruediger F. Loeckenhoff
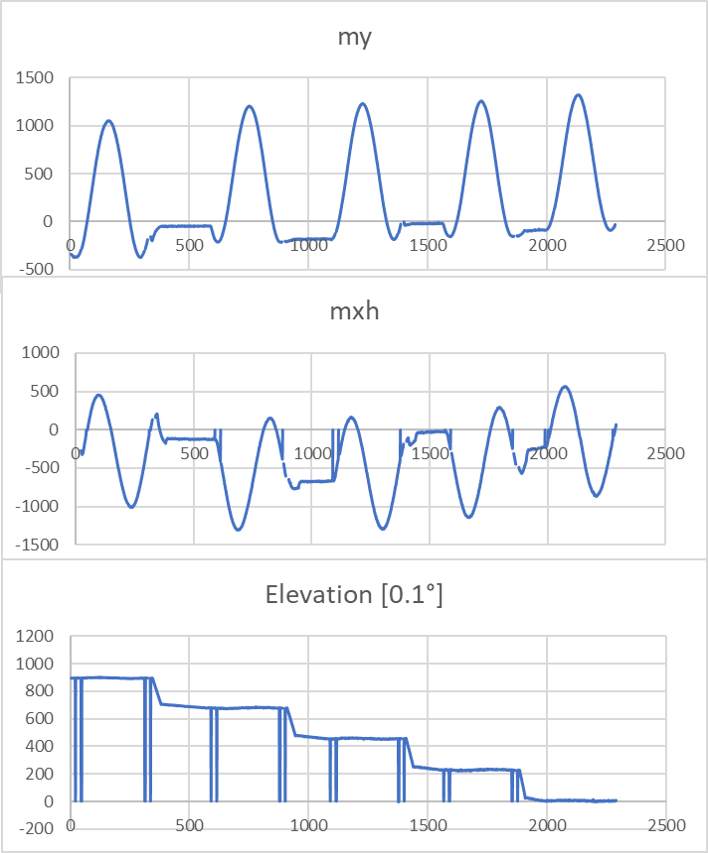
Ruediger F. LoeckenhoffPCBWay promised to try and send me the 25 new boards before Christmas. They would have been faster but my package with parts got stuck in the mail (Corona-Lockdowns...). To make use of the time, I tested a board with the new sensors on my desktop tracker. The MMC5603 magnetometer is better than the MPU9250 but the MXC4005XC accelerometer is noisier. I am now applying 20x oversampling to both devices in parallel with good results. The calibration routine ran through smoothly and the tracker behaves as expected. Below you can see the readings of the magnetic my component and the mx_horizontal component which is composed of mx and mz.
As you may see from the readings, the tracker is doing full azimuth sweeps starting at 90° elevation and going down to 0° elevation in 4 steps.
This is the final proof that we chose suitable components.
Once the new boards arrive I will have to figure out the programmer board which uploads the code and which should also do a quick test of all functions to make sure that the tracker board is working properly.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Thankyou for writing this amazing and informative article for us.
Regards: https://www.villagefloralhouse.com/
Are you sure? yes | no