 RigTig
RigTigForth
The first Forth I found that runs on the ESP8266 is PunyForth. I am still exploring it, but it seems to have lots of tools to work with ESP8266 capabilities.
A Forth environment is so extensible that the line between what is the system and what is user code is very indistinct. When this is completed, all the code will be included in the uploaded binary stored in with the base code uploaded with the esptool.
Hardware
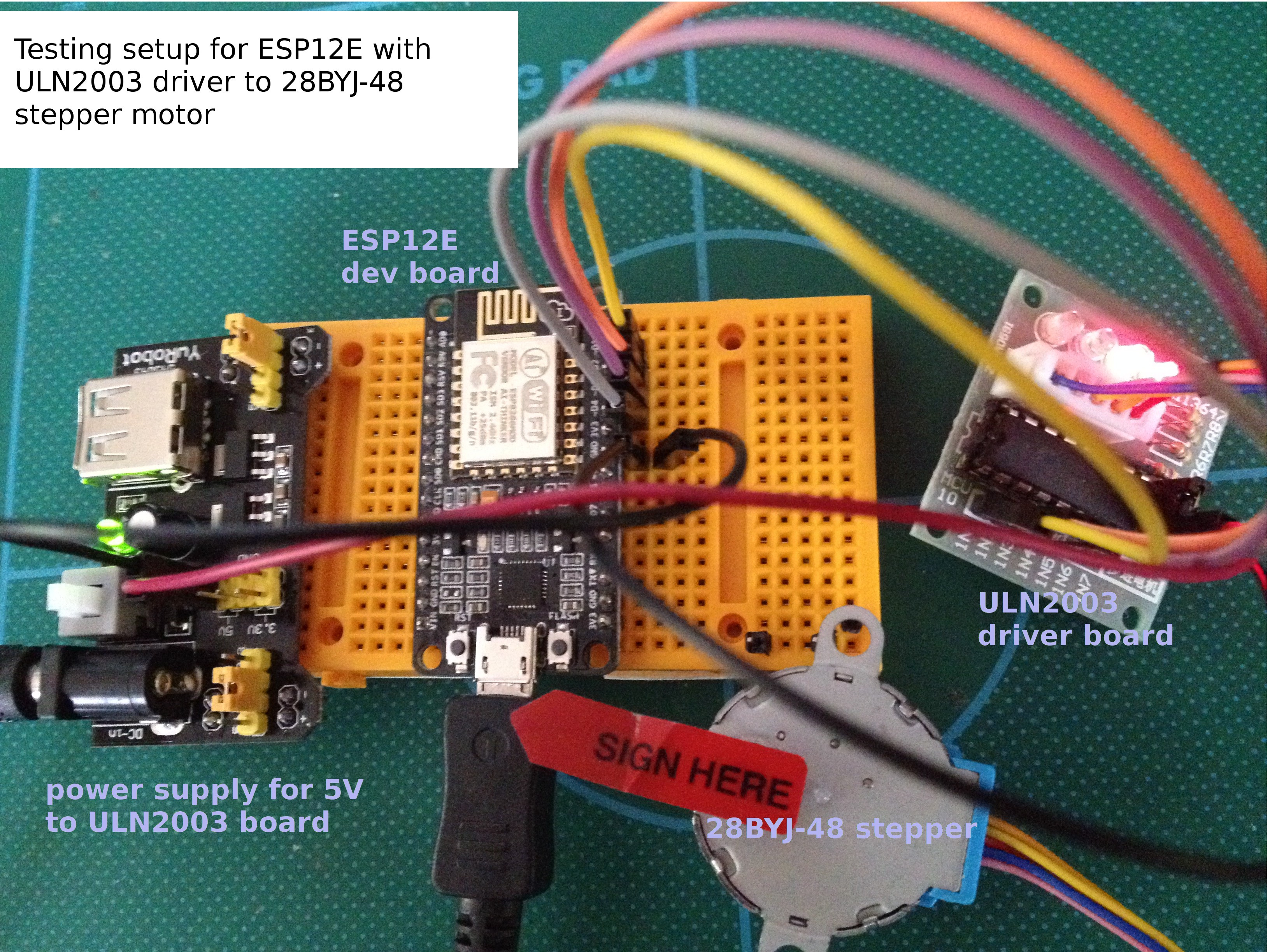
I have a couple of ESP-12E dev boards and several bare ESP-12E boards, so I intend to develop code to put onto a ESP-12E driving either a ULN2003 board or an A8266 driver. Maybe both, just because I can. If you have a preference, let me know and I'll do that first. The stepper can be whatever you want to drive using either board, with relevant power supply.


 heinz
heinz
 iSax
iSax
 agp.cooper
agp.cooper
 David Sanchez Falero
David Sanchez Falero
https://m.youtube.com/watch?v=oNAHOOolHWw shows a really quiet 3D printer. The stepper driver is minimising acceleration using fine micro-stepping. Now, for a cable-based printer, this is a very useful feature. Looks like we need an update, so we'll go for a more powerful stepper too.