 Joseph Marlin
Joseph MarlinI am excited to finally have some sort of an assembly coming together!
I have modeled the motor using the datasheet and some calipers.

I have also discovered the magic of GrabCAD for things like standard bolts and nuts.
I have now started the assembly model of the actual cat feeder. I have added mounting brackets and the wheels to the motor. Sadly, when I did this, I realized that my wheels are not symmetrical, and so they would need to turn opposite directions in order to work as scoops like intended.
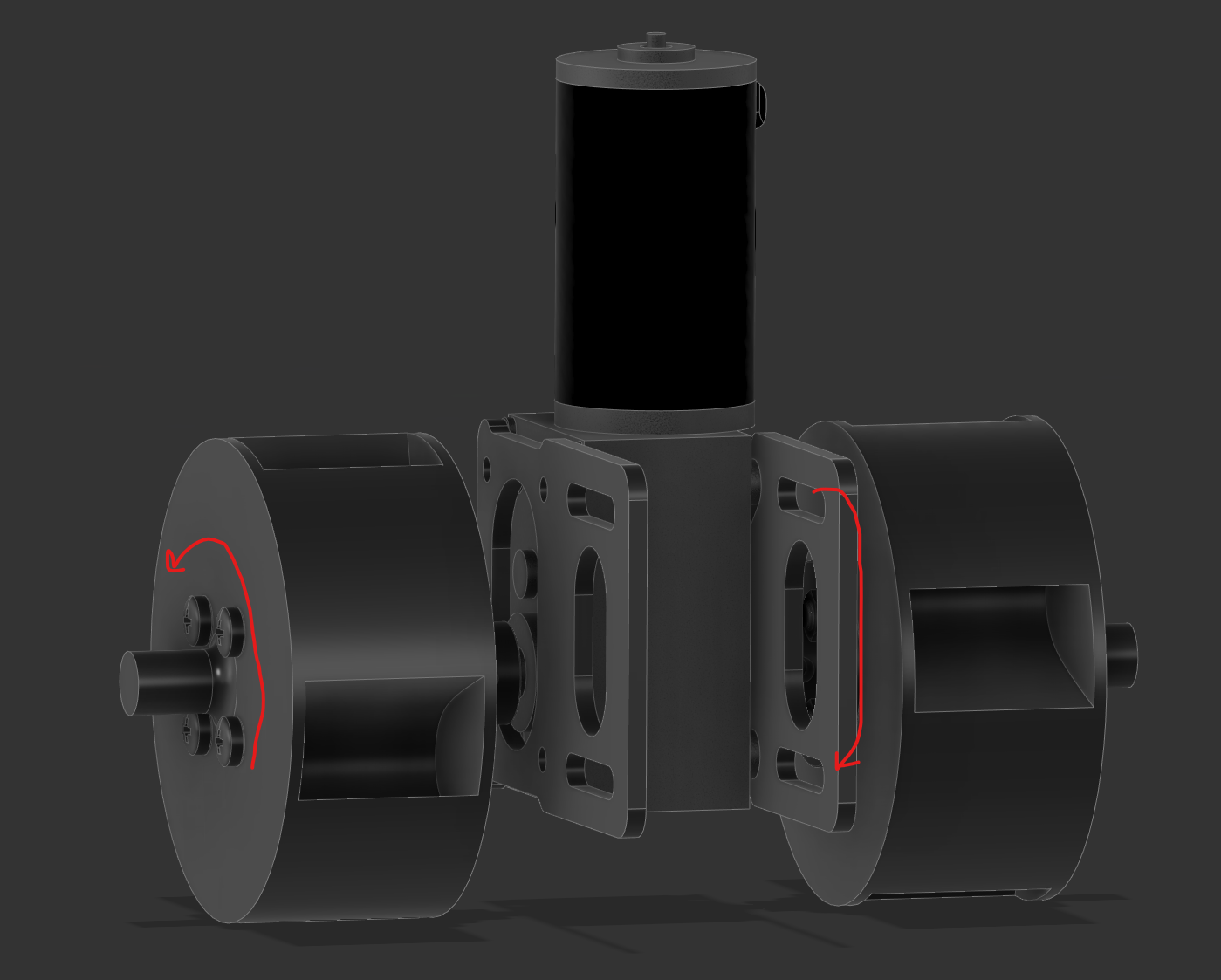
I could just design a mirror image wheel, or I could redesign the wheel to work if rotating in either direction. I must think on which is the better route to take here.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.