 Pavel Surynek
Pavel SurynekThe progress with RR1 rev.2 is not as fast as I would like it to be, but at least I can show some new designs concerning the base turret. Currently the main link connecting the base joint (shoulder joint) and the upper joint (elbow joint) is mounted on the redesigned base turret as can be seen in the photo below.
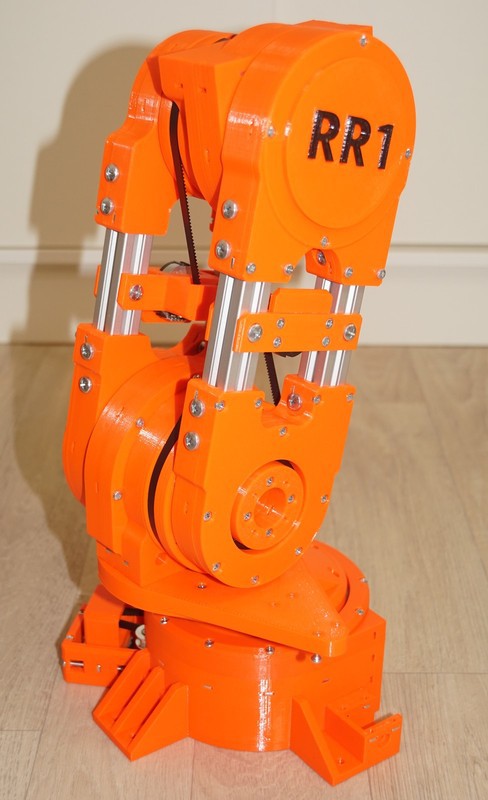
The main new feature of the base turret is that the encoder is moved from the motor shaft directly next to the base joint. The torque is transmitted to the encoder via belt that goes all around inside the base turret. The belt is directed out of the base turret towards the encoder by two pulleys (see photo below).
I expect higher precision from this design and as I wrote before, also increased collaborative ability.

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.