 Abraham Martinez Gracia
Abraham Martinez GraciaA couple of videos showing the field testing:
and
I developed a simple OS to control the Rover:
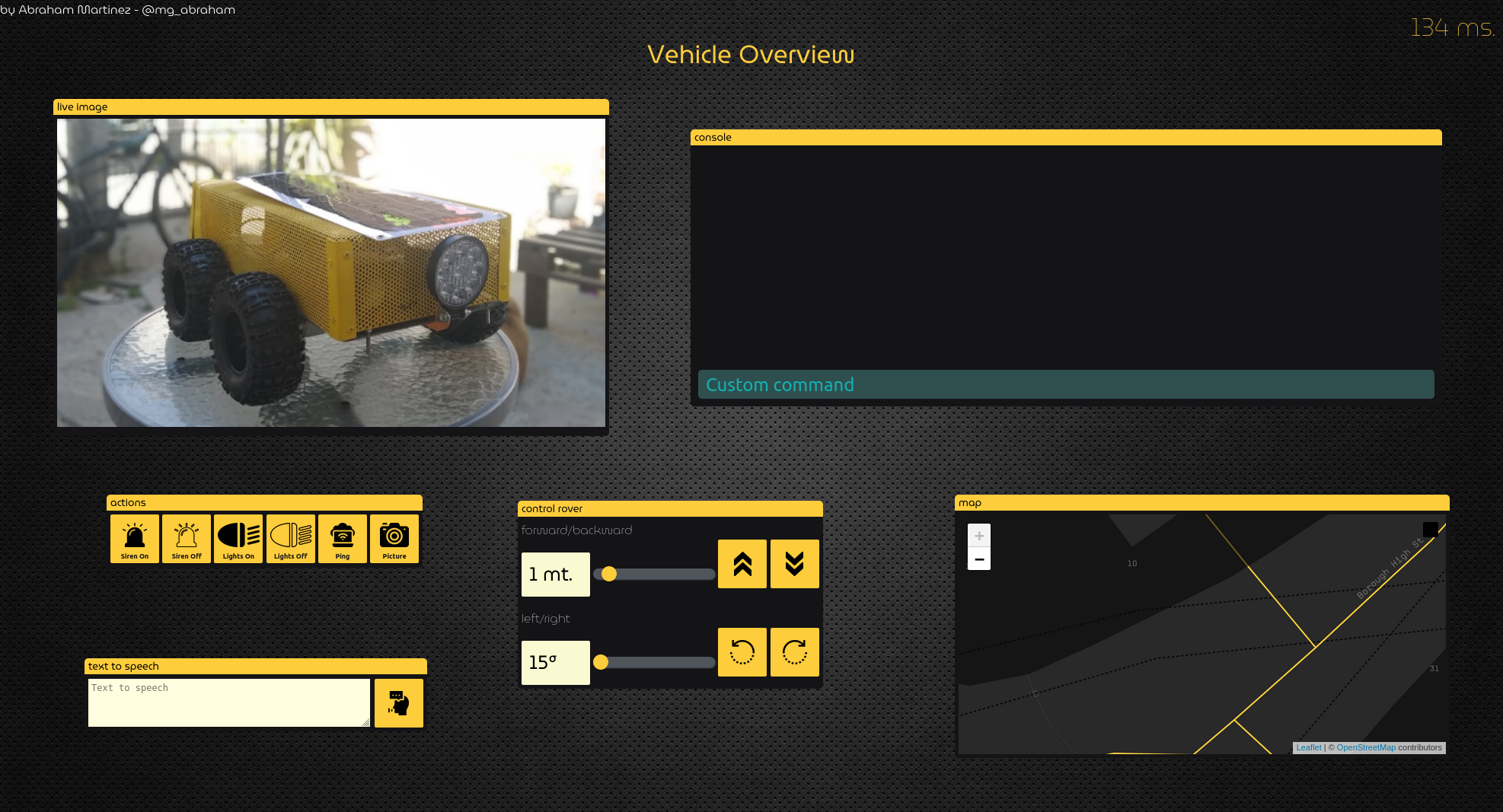
Autonomous remote-controlled rover with GPS and text-to-speech.
Already have an account? Log in.
To make the experience fit your profile, pick a username and tell us what interests you.
A couple of videos showing the field testing:
and
I developed a simple OS to control the Rover: