 Guillermo Perez Guillen
Guillermo Perez GuillenI downloaded and install the software ModusToolbox 2.4 in its version for Windows
I recommend you follow the instructions in this webinar, since some steps will serve as a reference: Implementing Machine Learning on the Edge
To develop my project, I will use the next code demo as a reference: "Picovoice_Porcupine_Wake_Word_Demo".
Step 1. Click on: File> New> ModusToolBox Application

Step 2. Insert kit name: CY8CKIT-062S2-43012, and click next

Step 3. Select "Picovoice_Porcupine_Wake_Word_Demo" poject, and click on create. Below is the project:

Step 4. Open main.c file and make the next changes:
// AUTHOR: GUILLERMO PEREZ GUILLEN
#include <stdbool.h>
#include <stdio.h>
#include <stdlib.h>
#include "cy_rgb_led.h"
#include "cybsp.h"
#include "pv_audio_rec.h"
#include "pv_keywords.h"
#include "pv_porcupine.h"
#include "pv_psoc6.h"
#include "cy_pdl.h"
#include "cyhal.h"
#include "cy_retarget_io.h"
#define MEMORY_BUFFER_SIZE (70 * 1024)
static const char* ACCESS_KEY = "gkylTu/7ljkHnB1/yobm78094/ea8DZ59MN7xcgWduJU1278u6AyGg=="; // AccessKey string obtained from Picovoice Console (https://picovoice.ai/console/)
static int8_t memory_buffer[MEMORY_BUFFER_SIZE] __attribute__((aligned(16)));
#define DELAY_LONG_MS (2) /* ADD 2 milliseconds */
#ifdef __PV_LANGUAGE_ENGLISH__
static const int32_t NUM_KEYWORDS = 4;
static const int32_t KEYWORD_MODEL_SIZES[] = {
sizeof(DEFAULT_KEYWORD_ARRAY),
sizeof(PINKY_KEYWORD_ARRAY),
sizeof(BUMBLEBEE_KEYWORD_ARRAY),
sizeof(ALEXA_KEYWORD_ARRAY)
};
static const void *KEYWORD_MODELS[] = {
DEFAULT_KEYWORD_ARRAY,
PINKY_KEYWORD_ARRAY,
BUMBLEBEE_KEYWORD_ARRAY,
ALEXA_KEYWORD_ARRAY
};
static const float SENSITIVITIES[] = {
0.75f,
0.75f,
0.75f,
0.75f
};
static const char *KEYWORDS_NAME[] = {
"Porcupine",
"Pinky",
"Bumblebee",
"Alexa"
};
#else
static const int32_t NUM_KEYWORDS = 1;
static const int32_t KEYWORD_MODEL_SIZES[] = { sizeof(DEFAULT_KEYWORD_ARRAY) };
static const void *KEYWORD_MODELS[] = { DEFAULT_KEYWORD_ARRAY };
static const float SENSITIVITIES[] = { 0.75f };
static const char *KEYWORDS_NAME[] = { "" };
#endif
static void error_handler(void) {
cy_rgb_led_on(CY_RGB_LED_COLOR_RED, CY_RGB_LED_MAX_BRIGHTNESS);
while(true);
}
int main(void) {
uint32_t delay_led_blink = DELAY_LONG_MS;
cy_rslt_t result;
result = cyhal_gpio_init(P0_2, CYHAL_GPIO_DIR_OUTPUT, CYHAL_GPIO_DRIVE_STRONG, CYBSP_LED_STATE_ON);
result = cyhal_gpio_init(P0_3, CYHAL_GPIO_DIR_OUTPUT, CYHAL_GPIO_DRIVE_STRONG, CYBSP_LED_STATE_ON);
result = cyhal_gpio_init(P1_3, CYHAL_GPIO_DIR_OUTPUT, CYHAL_GPIO_DRIVE_STRONG, CYBSP_LED_STATE_ON);
result = cyhal_gpio_init(P13_6, CYHAL_GPIO_DIR_OUTPUT, CYHAL_GPIO_DRIVE_STRONG, CYBSP_LED_STATE_ON);
if (result != CY_RSLT_SUCCESS)
{
CY_ASSERT(0);
}
pv_status_t status = pv_board_init();
if (status != PV_STATUS_SUCCESS) {
error_handler();
}
status = pv_message_init();
if (status != PV_STATUS_SUCCESS) {
error_handler();
}
const uint8_t *board_uuid = pv_get_uuid();
printf("UUID: ");
for (uint32_t i = 0; i < pv_get_uuid_size(); i++) {
printf(" %.2x", board_uuid[i]);
}
printf("\r\n");
status = pv_audio_rec_init();
if (status != PV_STATUS_SUCCESS) {
printf("Audio init failed with '%s'\r\n", pv_status_to_string(status));
error_handler();
}
status = pv_audio_rec_start();
if (status != PV_STATUS_SUCCESS) {
printf("Recording audio failed with '%s'\r\n", pv_status_to_string(status));
error_handler();
}
pv_porcupine_t *handle = NULL;
status = pv_porcupine_init(
ACCESS_KEY,
MEMORY_BUFFER_SIZE,
memory_buffer,
NUM_KEYWORDS,
KEYWORD_MODEL_SIZES,
KEYWORD_MODELS,
SENSITIVITIES,
&handle);
if (status != PV_STATUS_SUCCESS) {
printf("Porcupine init failed with '%s'\r\n", pv_status_to_string(status));
error_handler();
}
while (true) {
const int16_t *buffer = pv_audio_rec_get_new_buffer();
if (buffer) {
int32_t keyword_index = -1;
const pv_status_t status = pv_porcupine_process(handle, buffer, &keyword_index);
if (status != PV_STATUS_SUCCESS) {
printf("Porcupine process failed with '%s'\r\n", pv_status_to_string(status));
error_handler();
}
if (keyword_index >= 0) {
printf("[wake word] %s\r\n", KEYWORDS_NAME[keyword_index]);
switch (keyword_index) {
case 0: // 1 -> 2 or 2 -> 3
cy_rgb_led_on(CY_RGB_LED_COLOR_GREEN, CY_RGB_LED_MAX_BRIGHTNESS);
for (int i = 1; i <= 800; i++){
cyhal_gpio_write(P0_2, CYBSP_LED_STATE_ON);
cyhal_gpio_write(P0_3, CYBSP_LED_STATE_OFF);
cyhal_gpio_write(P1_3, CYBSP_LED_STATE_ON);
cyhal_gpio_write(P13_6, CYBSP_LED_STATE_OFF);
cyhal_system_delay_ms(delay_led_blink);
cyhal_gpio_write(P0_2, CYBSP_LED_STATE_ON);
cyhal_gpio_write(P0_3, CYBSP_LED_STATE_OFF);
cyhal_gpio_write(P1_3, CYBSP_LED_STATE_OFF);
cyhal_gpio_write(P13_6, CYBSP_LED_STATE_ON);
cyhal_system_delay_ms(delay_led_blink);
cyhal_gpio_write(P0_2, CYBSP_LED_STATE_OFF);
cyhal_gpio_write(P0_3, CYBSP_LED_STATE_ON);
cyhal_gpio_write(P1_3, CYBSP_LED_STATE_OFF);
cyhal_gpio_write(P13_6, CYBSP_LED_STATE_ON);
cyhal_system_delay_ms(delay_led_blink);
cyhal_gpio_write(P0_2, CYBSP_LED_STATE_OFF);
cyhal_gpio_write(P0_3, CYBSP_LED_STATE_ON);
cyhal_gpio_write(P1_3, CYBSP_LED_STATE_ON);
cyhal_gpio_write(P13_6, CYBSP_LED_STATE_OFF);
cyhal_system_delay_ms(delay_led_blink);
}
break;
case 1: // 2 -> 1 or 3 -> 2
cy_rgb_led_on(CY_RGB_LED_COLOR_CYAN, CY_RGB_LED_MAX_BRIGHTNESS);
for (int i = 1; i <= 800; i++){
cyhal_gpio_write(P0_2, CYBSP_LED_STATE_OFF);
cyhal_gpio_write(P0_3, CYBSP_LED_STATE_ON);
cyhal_gpio_write(P1_3, CYBSP_LED_STATE_ON);
cyhal_gpio_write(P13_6, CYBSP_LED_STATE_OFF);
cyhal_system_delay_ms(delay_led_blink);
cyhal_gpio_write(P0_2, CYBSP_LED_STATE_OFF);
cyhal_gpio_write(P0_3, CYBSP_LED_STATE_ON);
cyhal_gpio_write(P1_3, CYBSP_LED_STATE_OFF);
cyhal_gpio_write(P13_6, CYBSP_LED_STATE_ON);
cyhal_system_delay_ms(delay_led_blink);
cyhal_gpio_write(P0_2, CYBSP_LED_STATE_ON);
cyhal_gpio_write(P0_3, CYBSP_LED_STATE_OFF);
cyhal_gpio_write(P1_3, CYBSP_LED_STATE_OFF);
cyhal_gpio_write(P13_6, CYBSP_LED_STATE_ON);
cyhal_system_delay_ms(delay_led_blink);
cyhal_gpio_write(P0_2, CYBSP_LED_STATE_ON);
cyhal_gpio_write(P0_3, CYBSP_LED_STATE_OFF);
cyhal_gpio_write(P1_3, CYBSP_LED_STATE_ON);
cyhal_gpio_write(P13_6, CYBSP_LED_STATE_OFF);
cyhal_system_delay_ms(delay_led_blink);
}
break;
case 2: // 1 -> 3
cy_rgb_led_on(CY_RGB_LED_COLOR_RED, CY_RGB_LED_MAX_BRIGHTNESS);
for (int i = 1; i <= 1600; i++){
cyhal_gpio_write(P0_2, CYBSP_LED_STATE_ON);
cyhal_gpio_write(P0_3, CYBSP_LED_STATE_OFF);
cyhal_gpio_write(P1_3, CYBSP_LED_STATE_ON);
cyhal_gpio_write(P13_6, CYBSP_LED_STATE_OFF);
cyhal_system_delay_ms(delay_led_blink);
cyhal_gpio_write(P0_2, CYBSP_LED_STATE_ON);
cyhal_gpio_write(P0_3, CYBSP_LED_STATE_OFF);
cyhal_gpio_write(P1_3, CYBSP_LED_STATE_OFF);
cyhal_gpio_write(P13_6, CYBSP_LED_STATE_ON);
cyhal_system_delay_ms(delay_led_blink);
cyhal_gpio_write(P0_2, CYBSP_LED_STATE_OFF);
cyhal_gpio_write(P0_3, CYBSP_LED_STATE_ON);
cyhal_gpio_write(P1_3, CYBSP_LED_STATE_OFF);
cyhal_gpio_write(P13_6, CYBSP_LED_STATE_ON);
cyhal_system_delay_ms(delay_led_blink);
cyhal_gpio_write(P0_2, CYBSP_LED_STATE_OFF);
cyhal_gpio_write(P0_3, CYBSP_LED_STATE_ON);
cyhal_gpio_write(P1_3, CYBSP_LED_STATE_ON);
cyhal_gpio_write(P13_6, CYBSP_LED_STATE_OFF);
cyhal_system_delay_ms(delay_led_blink);
}
break;
case 3: // 3 -> 1
cy_rgb_led_on(CY_RGB_LED_COLOR_BLUE, CY_RGB_LED_MAX_BRIGHTNESS);
for (int i = 1; i <= 1600; i++){
cyhal_gpio_write(P0_2, CYBSP_LED_STATE_OFF);
cyhal_gpio_write(P0_3, CYBSP_LED_STATE_ON);
cyhal_gpio_write(P1_3, CYBSP_LED_STATE_ON);
cyhal_gpio_write(P13_6, CYBSP_LED_STATE_OFF);
cyhal_system_delay_ms(delay_led_blink);
cyhal_gpio_write(P0_2, CYBSP_LED_STATE_OFF);
cyhal_gpio_write(P0_3, CYBSP_LED_STATE_ON);
cyhal_gpio_write(P1_3, CYBSP_LED_STATE_OFF);
cyhal_gpio_write(P13_6, CYBSP_LED_STATE_ON);
cyhal_system_delay_ms(delay_led_blink);
cyhal_gpio_write(P0_2, CYBSP_LED_STATE_ON);
cyhal_gpio_write(P0_3, CYBSP_LED_STATE_OFF);
cyhal_gpio_write(P1_3, CYBSP_LED_STATE_OFF);
cyhal_gpio_write(P13_6, CYBSP_LED_STATE_ON);
cyhal_system_delay_ms(delay_led_blink);
cyhal_gpio_write(P0_2, CYBSP_LED_STATE_ON);
cyhal_gpio_write(P0_3, CYBSP_LED_STATE_OFF);
cyhal_gpio_write(P1_3, CYBSP_LED_STATE_ON);
cyhal_gpio_write(P13_6, CYBSP_LED_STATE_OFF);
cyhal_system_delay_ms(delay_led_blink);
}
break;
default:
break;
}
Cy_SysLib_Delay(500);
cy_rgb_led_off();
}
}
}
pv_board_deinit();
pv_audio_rec_deinit();
pv_porcupine_delete(handle);
}Analysis:
- To avoid duplication of any pin used by the "IoT sense expansion kit" board, I have enabled the next four pins to take control of the stepper motor:
result = cyhal_gpio_init(P0_2, CYHAL_GPIO_DIR_OUTPUT, CYHAL_GPIO_DRIVE_STRONG, CYBSP_LED_STATE_ON); result = cyhal_gpio_init(P0_3, CYHAL_GPIO_DIR_OUTPUT, CYHAL_GPIO_DRIVE_STRONG, CYBSP_LED_STATE_ON); result = cyhal_gpio_init(P1_3, CYHAL_GPIO_DIR_OUTPUT, CYHAL_GPIO_DRIVE_STRONG, CYBSP_LED_STATE_ON); sult = cyhal_gpio_init(P13_6, CYHAL_GPIO_DIR_OUTPUT, CYHAL_GPIO_DRIVE_STRONG, CYBSP_LED_STATE_ON);
- In my case, the stepper motor I have used needs 48 steps to make a 360 degree turn. The speed of rotation is controlled by the delay, that is, 2 ms.
- insert the access key obtained from the Picovoice platform in:
static const char* ACCESS_KEY - I have designed the wake words table shown below:
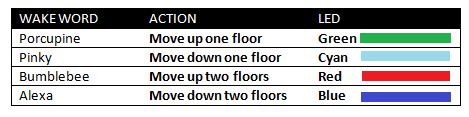
- case 0 is used to move from floor 1 to 2 or from 2 to 3;
- case 1 is used to move from floor 2 to 1 or from 3 to 2;
- case 2 is used to move from floor 1 to 3; Y
- case 3 is used to move from floor 3 to floor 1.
Step 5. I have added the "Pinky" wake word in the pv_params.h file. This wake word was obtained from the Picovoice platform as shown in the next section.
// Wake-word = pinky
static const uint8_t PINKY_KEYWORD_ARRAY[] __attribute__ ((aligned (16))) = {
0xde, 0x5a, 0x0b, 0xec, 0x84, 0x04, 0xa4, 0x94, 0x5a, 0x6a, 0x1c, 0x2f, 0x62, 0xb9, 0x71, 0xc6, 0x9c, 0xf5,
0xfd, 0xe4, 0x7e, 0xfd, 0xbd, 0xc9, 0xea, 0x4b, 0x78, 0x95, 0xd4, 0xf3, 0xbe, 0x1f, 0xbe, 0x4a, 0xf9, 0x6d,
0xce, 0x10, 0x05, 0xdb, 0xbc, 0x88, 0xdf, 0x5d, 0xa4, 0xbd, 0xab, 0x4e, 0x9b, 0x9f, 0x2c, 0x17, 0x6a, 0x42,
0xb1, 0xbd, 0x21, 0x8b, 0xfe, 0x7c, 0x74, 0xbf, 0xe9, 0xb8, 0x12, 0x25, 0x28, 0x1d, 0x74, 0x4d, 0x2c, 0x48,
0x60, 0x69, 0x7b, 0x45, 0xf6, 0xc8, 0x9f, 0x42, 0x63, 0x8a, 0xe0, 0x08, 0x1d, 0xf1, 0x8a, 0xd5, 0x0c, 0x68,
0xf0, 0x19, 0x8f, 0xd0, 0x61, 0x87, 0xd4, 0x76, 0x72, 0x67, 0xf8, 0x37, 0x04, 0x38, 0xf2, 0xcd, 0x4a, 0x70,
0xc3, 0xcc, 0x7f, 0xc4, 0x97, 0x20, 0xf8, 0x53, 0x25, 0xa7, 0xc2, 0xf7, 0xfa, 0x3c, 0x47, 0xc2, 0x0a, 0x06,
0x8a, 0xc2, 0xb0, 0xf8, 0x05, 0xd3, 0x8e, 0x6d, 0x2a, 0x65, 0x5f, 0xd8, 0xfd, 0xa9, 0xcf, 0xe5, 0xd4, 0x33,
0x8e, 0xfc, 0x44, 0x72, 0x0f, 0x49, 0x3b, 0xad, 0x50, 0x5d, 0xab, 0x69, 0x17, 0xb1, 0xc3, 0x28, 0x28, 0x5a,
0x6f, 0xd8, 0xef, 0x25, 0xab, 0xe8, 0x2c, 0x30, 0x0e, 0x1b, 0xfa, 0x4a, 0x3d, 0xf2, 0x03, 0xd8, 0x18, 0xb3,
0x47, 0xa8, 0xba, 0xed, 0xdc, 0x65, 0xce, 0x85, 0x58, 0x3f, 0xba, 0x9d, 0x32, 0xd5, 0xc1, 0x1c, 0xef, 0xbf,
0x85, 0xbf, 0xa1, 0x9e, 0x19, 0x60, 0x98, 0xe7, 0x30, 0x63, 0x86, 0xf6, 0x29, 0xff, 0x88, 0xa2, 0xf7, 0x94,
0xe8, 0x80, 0x9d, 0x4b, 0x35, 0xa3, 0x43, 0x90, 0xe7, 0x85, 0x92, 0x9e, 0x82, 0x18, 0x80, 0x1f, 0x8e, 0x21,
0x78, 0x3c, 0xa2, 0x85, 0x6f, 0xd9, 0x7a, 0x44, 0x7e, 0x9a, 0xe8, 0xac, 0x76, 0xe2, 0x5b, 0x04, 0x88, 0x64,
0x55, 0x93, 0x95, 0x8e, 0x04, 0x08, 0x2f, 0xf4, 0x82, 0x9b, 0xa9, 0xc7, 0xf1, 0x14, 0x58, 0x73, 0xeb, 0x7f,
0xb1, 0x99, 0x63, 0x19, 0xe3, 0xda, 0x9d, 0x2d, 0x73, 0x46, 0xc0, 0x40, 0xdf, 0xf7, 0x36, 0x31, 0xf6, 0xa7,
0x61, 0x03, 0xb5, 0x0d, 0xc8, 0x6d, 0x7f, 0xd5, 0x4a, 0x56, 0x46, 0xf5, 0xbd, 0x69, 0x13, 0xf0, 0x57, 0xa7,
0x0b, 0xe0, 0x49, 0x8a, 0xa5, 0x23, 0x78, 0x71, 0x4e, 0x30, 0x91, 0x1a, 0xb9, 0x38, 0xba, 0x43, 0xe1, 0x7a,
0xfd, 0x03, 0x1b, 0xf1, 0x27, 0x0b, 0x26, 0xbb, 0xc3, 0xee, 0x11, 0x66, 0xd1, 0x29, 0x93, 0xdf, 0x7f, 0xf8,
0x98, 0x74, 0x1e, 0x96, 0x59, 0xce, 0x11, 0xba, 0x68, 0xed, 0xf4, 0x80, 0x25, 0x4d, 0xd2, 0x3d, 0x49, 0xff,
0x33, 0x4d, 0xdc, 0xba, 0xd2, 0x9c, 0xdf, 0x0c, 0xf5, 0x58, 0xd4, 0x5a, 0x82, 0xa2, 0xd7, 0x02, 0x17, 0xe2,
0xa5, 0xb9, 0x5b, 0x96, 0xa0, 0xf5, 0x50, 0x47, 0x36, 0x9a, 0x55, 0x99, 0xfe, 0x08, 0x10, 0x0f, 0xd2, 0x17,
0x4a, 0x25, 0x9b, 0x3c, 0x8c, 0x78, 0xfc, 0x35, 0x6b, 0x94, 0xd1, 0xd4, 0x39, 0x51, 0xc1, 0x77, 0x34, 0xc0,
0x3b, 0x73, 0x50, 0x89, 0x96, 0x83, 0x2d, 0xfe, 0x95, 0x81, 0x55, 0x34, 0xdb, 0x6a, 0xbd, 0xb8, 0x9a, 0x4a,
0xbb, 0x0d, 0xf6, 0x0e, 0x8a, 0x3e, 0xec, 0x9f, 0xc6, 0x33, 0x99, 0x39, 0x6e, 0xda, 0x03, 0xfe, 0x9a, 0x0e,
0x7a, 0x2d, 0xa0, 0xa0, 0xfb, 0x5f, 0xe9, 0x13, 0xdc, 0x5a
};
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.