 kelvinA
kelvinAFirst up, I want to say that the doorstop Tetrinsic shape unexpectedly helped out in this design. Thumb1 would've instersected Finger2 and Fingers2-4 would've intersected the same fingers on the other side if not for this design:
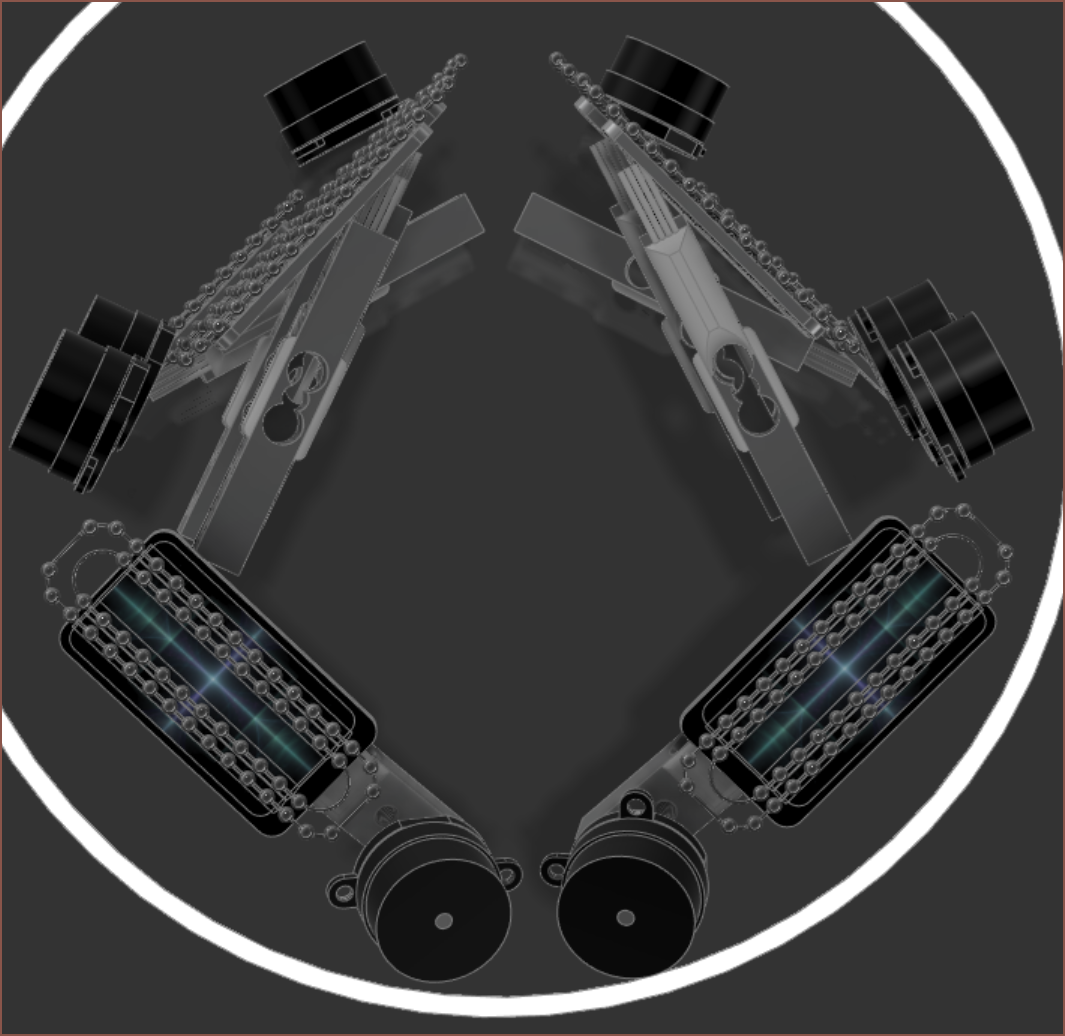
The most notable change is that I've brought Finger2-4 closer to the East/West corner by 10mm, I've increased the height and that I've increased the distance between the edge of the Tetrinsic and the edge of the cutout by 3.3mm:
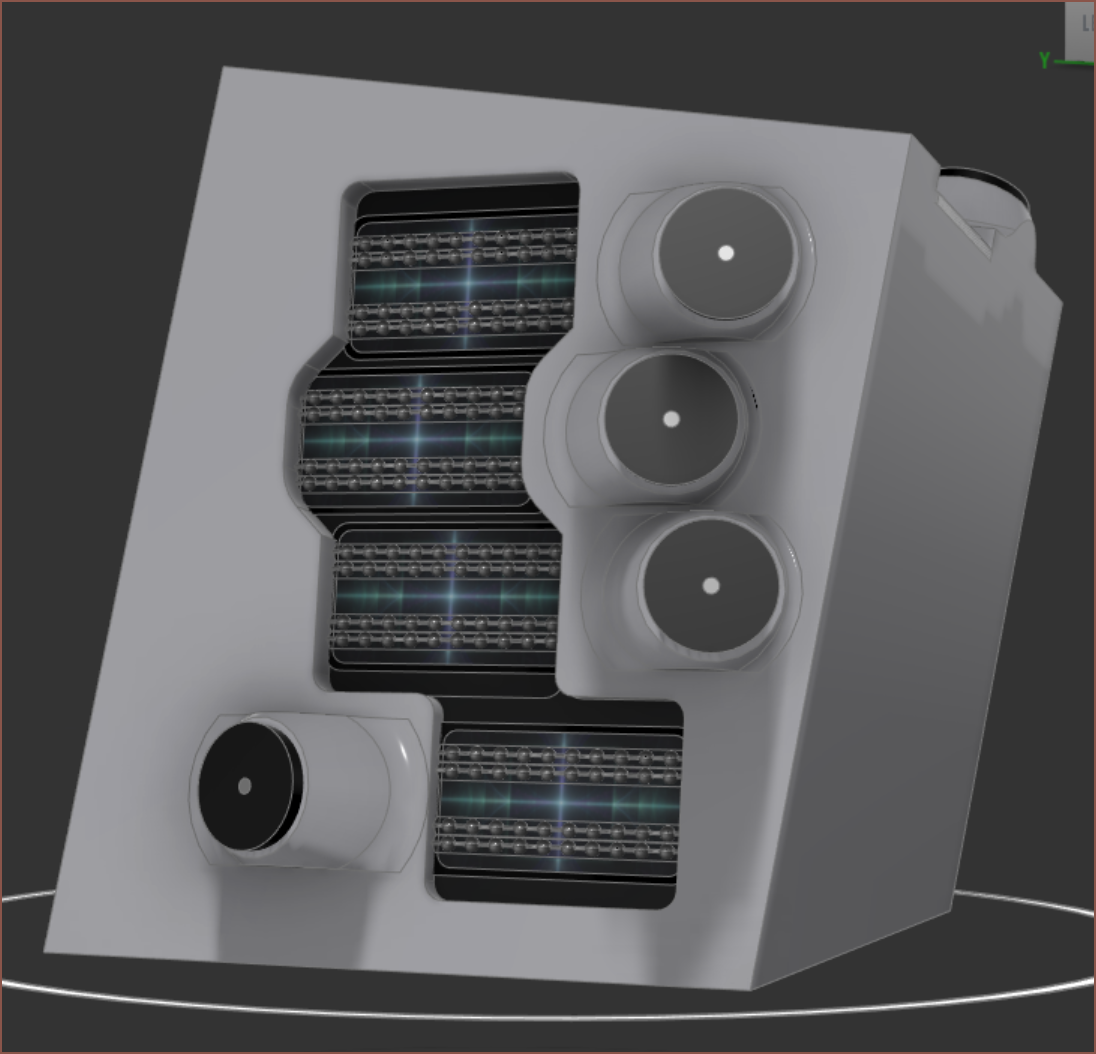 I've also increased the main angle from 10 to 12 degrees and decreased the main square from 100 to 95mm. I think all those changes make the design look sleeker.
I've also increased the main angle from 10 to 12 degrees and decreased the main square from 100 to 95mm. I think all those changes make the design look sleeker.It's just a shame those simple and basic tweaks took an hour to go from poping off the concept print to sending the next one right now. I was hoping I could have the next one sent in 10 minutes.
Solution mining... ends, in 24 days.
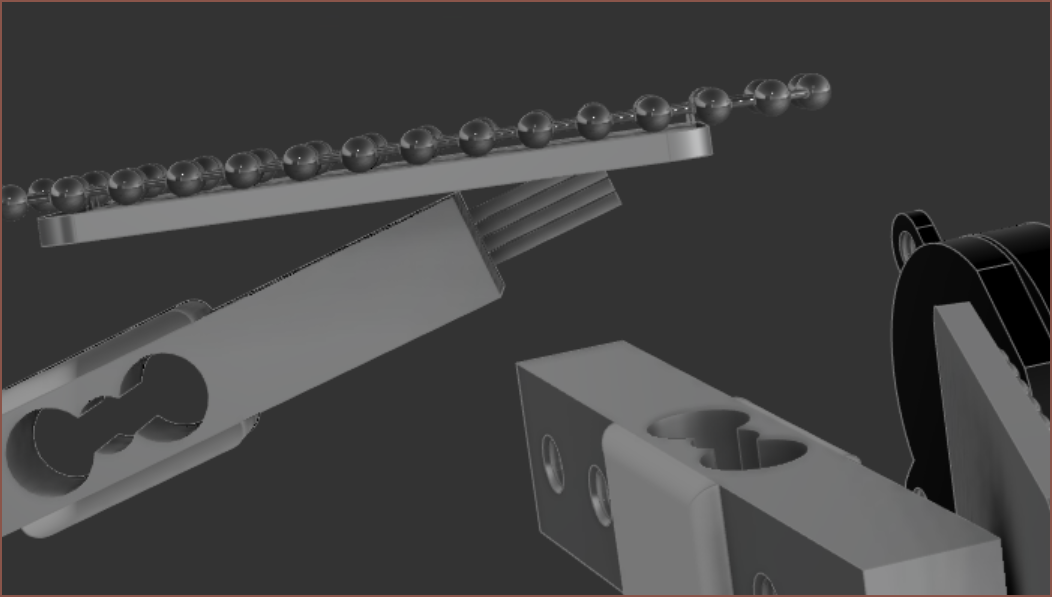
[8th Jan, 00:10] I just printed it and the Tetrinsics kind of feel like the angle is off and it might be why Finger2 is colliding with the motor bump. Other than that, it's all good!
Another cool thing I noticed is that, since both chain columns are exposed, there's essentially 2 different hand angles usable.
[02:00] Top square is now 90mm and I think that's a good size so I'll stop miniaturising there. I've set the angle of Fingers2-5 to be half of the angle between the top and bottom edge of the face, thus it's 4.25 degrees. I've also slightly shortened Tetrinsic so that everything fit without conflicts.


Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.