 kelvinA
kelvinA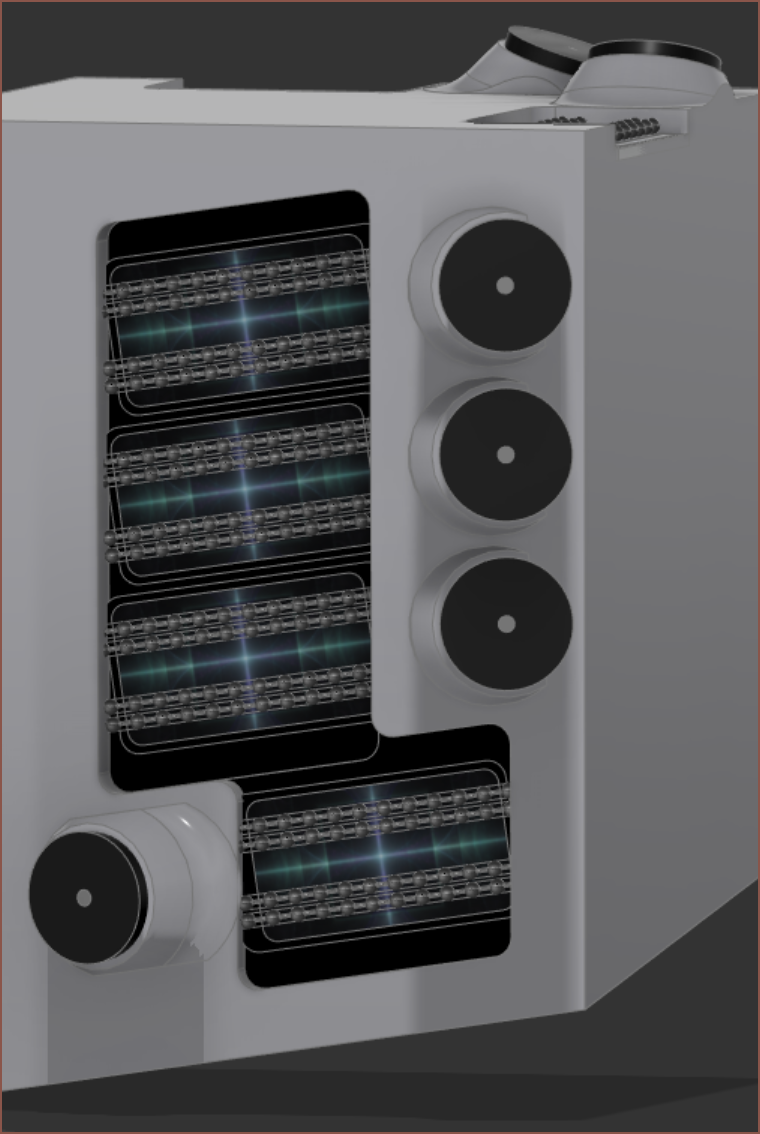 I've moved everything right to the edge. Speaking of the edge, 3.3mm is barely enough space around the fingers and I've increased it to 4.5mm.
I've moved everything right to the edge. Speaking of the edge, 3.3mm is barely enough space around the fingers and I've increased it to 4.5mm. Somewhat suprisingly, I don't like the aerofoil motor cap design so I've reverted back to the cone.
I think that the reason why this Finger2 issue keeps reappearing is because my finger stops as soon as it barely touches it, making me feel like "I just need to move it back a tad". I tried the earlier prints and the motor bump is much more pronounced than when I first tried it.
Unfortunately, if this concept tweak doesn't pass, the cuboid solution of TestCut will fail; I've squeezed out every last millimetre. I have a feeling it's going to fail anyway because Finger5's active area is a good 10mm out from the edge.
Wait...
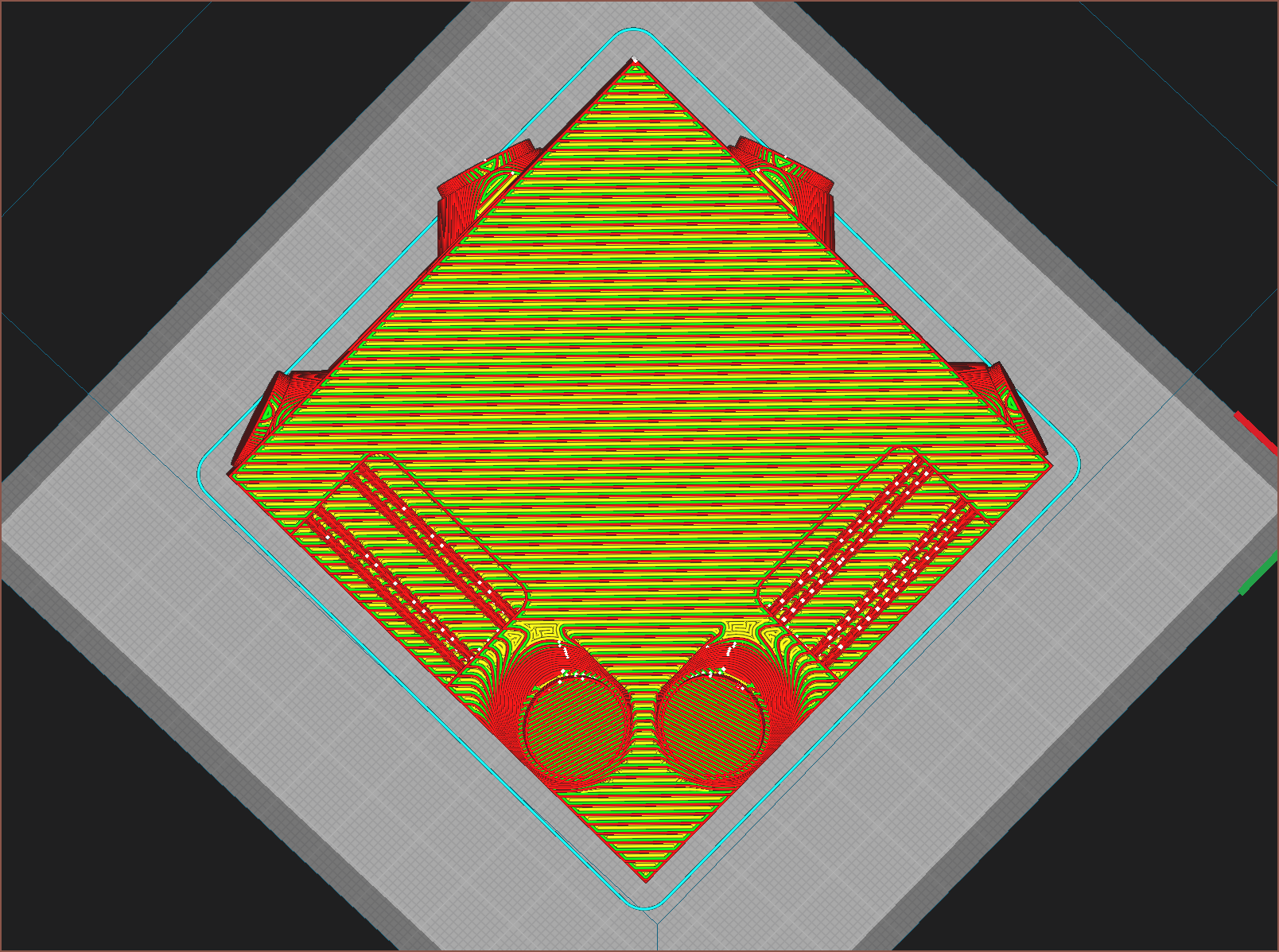
If that's the case, I might as well save 3 hours of printing and 75g of filament and just call it a solution fail here. The problem actually seems to stem from Thumb1! Wow!! And I've been scrutinising Finger2 and 5 this entire time! If I use the joints midway up the thumb instead of the tips, the current solution that I printed... passes (ish; could still use that cutout space increase).
A new solution... will have to be verified.
Solution mining... ends, in 23 days.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.