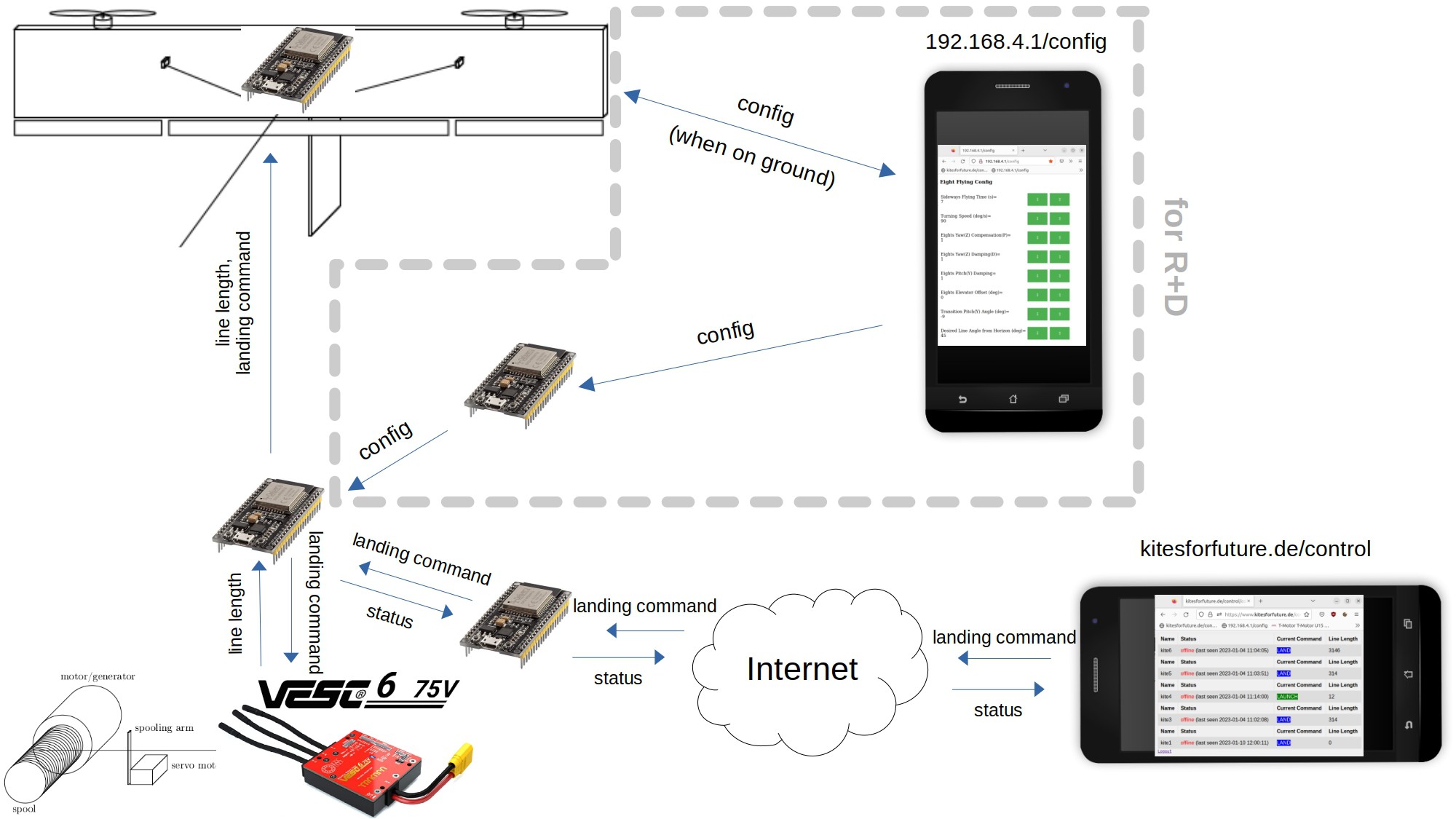
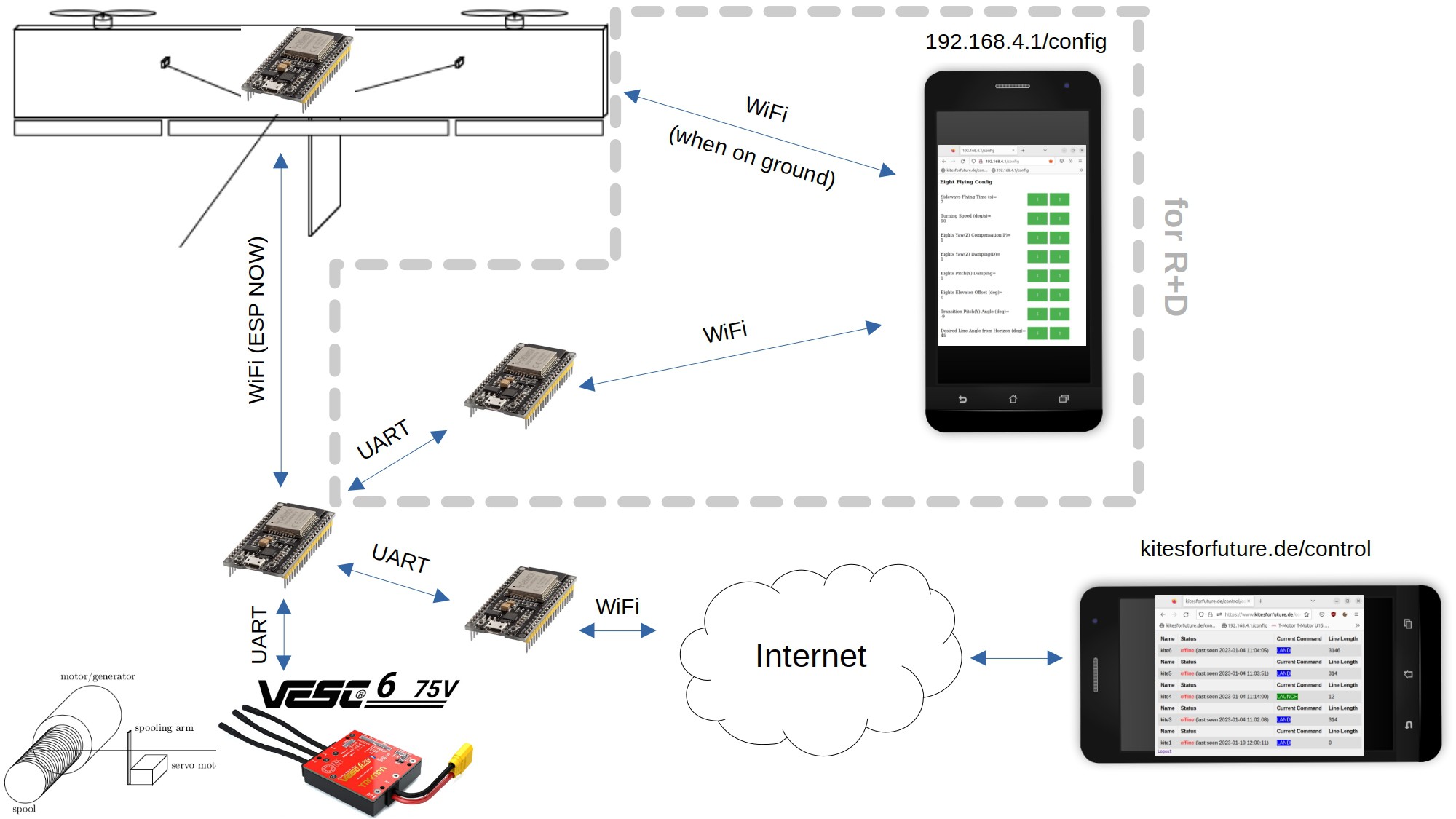
Our most recent addition of functionality:
1. Configuring PID variables, target height, etc. to tune autopilot behaviour (locally via WiFi)
2. Initiating launch and landing from home, viewing the current status (via Internet)
Here is how it's implemented:
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.