Wednesday, 13/09/2023, 12:13
I'm feeling like whatever the hell I wrote in these "serious" project logs are complete nonsense, not only because I'm talking things with almost no basis in fact, but also because it looks like writings of a mad man.
I was simply trying to read previous project logs and I mix texts were I wrote it in the past and parts that I wrote in the present, so I may be referring to something like I'm talking about "the previous subject matter" but there are multiple paragraphs referring to something completly different.
... Which makes me wanna make more project logs that are more organized...
... But I'm holding myself to not do such bullshitery simply because I didn't finish the goddang 3D models yet.
-----------------------------------------------------------------------------------------------------------------------------------------------
Well... Hi, good day, good afternoon and good night.
I'm still in an awful mood, but I would guess that it would be useful to simply do something (anything) rather than do nothing.

And well... I'm just going to post here everything I need to watch so I stop procrastinating...

... It is kinda funny how I plainly said that this project is dead on Project Details, but I keep going with the project.
Being honest, if I had the money, I would've pay someone actually skilled to make this project a reality instead of cracking my head against the wall...
To be honest², even though I'm watching video per video, I'm not understanding half of the stuff that I'm looking at.
... I really need help with this project...
-----------------------------------------------------------------------------------------------------------------------------------------------
Also, one thing that I forgot to talk about in all these project logs: remelting of 3D printed parts.
Basically, you could 3D print parts with 100% infill, put them in a medium such as plaster/gypsum and then put the thing inside an oven with more or less the melting point of the plastic being used and take it out.
Basically, 3D prints have a problem of layer adhesion, meaning that all 3D printed parts are basically a pile of sheets of paper-thin plastic layers held together by the adhesion of its surface.
By remelting the parts, you are turning the entire thing in one solid piece of plastic.
I saw other methods that use salt instead of plaster.
In anyway, you could commission 3D printed parts on a plastic of your choosing (such as HDPE) on one of those 3D print online stores and use this method to make the parts stronger.
Plus, you could drill the parts and infuse them with fillers such as steel wire and such.
Or just embed the wire on the 3D print during printing. lol
I just saw this video from the same channel, it is another interesting option.
Although carbon fiber is expensive, glass fiber isn't that much.
You could use either method to make the 3d printed parts stronger:
- Drill holes and inserting the steel wires and remelting.
- Drill holes and inserting carbon fiber/glass fiber and remelting.
- Injecting epoxy with glass/carbon fiber in the 3D print.
-----------------------------------------------------------------------------------------------------------------------------------------------
Well, I was looking into buying slew bearings and make copies of them, and while I was doing that I stumbled upon this video.
I don't know what material it uses for the flat bearing plates that it has, but I thought it was an interesting concept.
Plus, I did like the idea of inserting limiters on the ring in order to, well, limit its rotation.
This means that the bearings that I've made aren't suitable as the way they are now, I need to remake them with a better concept in mind.
-----------------------------------------------------------------------------------------------------------------------------------------------
Here the videos that I need to remember to watch and re-watch until I learn what I need to learn:
Okay, now for actual Finite Element Method I will put the concept ones first... Because reasons...
There was like one tutorial here, but it was incomplete because the full explanation was in the guy's course, which cost 90 dollars.
This one is actually very old (which certain tools are a little different) and the video stops before explaining how to see the loads.
This one explains it a little better, but I still don't know if the red parts are too difficult
Still watching and not understanding a hint, my mind simply drifts away while watching the videos.
I'm tempted in simply making everything as rugged as possible with steel instead of giving a dang about efficiency or weight savings...
... As if I had the money to do such thing, thus the reason why I need to learn.
--------------------------------------------------------------------------------------------------------------------------------------------
By the way, I asked ChatGPT how much pressure would be being applied to the bearing with 4cm of height and 20cm of diameter (just like the bearing I've made) in a 1,20 meter long lever attached to it and a weight of 300kg at its tip, it would be suffering a force around 3000 Newton meter.
Converting this to MPa, this would be around 0.1 to 0.3 Megapascals, and since HDPE has 30 MPa of tensile strength, this is way below its capacity.
Of course, it is ChatGPT we are talking about.
But nevertheless, I checked a beam calculator with said length and a load of 300kg (3kn) at 1 meter (1000mm) to 1,2 meters (1200mm) with a support at 0cm and another at 20cm (200mm), the weight on both parts was more or less around 15 to 30 kilonewtons, which would be more or less 0.03 MPa.
I also did the same thing for lever calculators and the loads were also equivalent.
Well, I hope I'm right, but this seems like I'm really working way below the breaking point of either HDPE and Aluminium.
Even if I were to increase the weight to 3000kg, 10 times more, I would still be under its breaking point.
I think.
Don't go using these results on your own or you may be seriously hurt or even dying, you take these values on your own risk.
I asked around and it seems like neither aluminium nor HDPE are suitable for the 300kg load, in either way, I can't know for sure until I actually learn the simulations and/or test it personally.
--------------------------------------------------------------------------------------------------------------------------------------------
I'm still procrastinating and screaming in despair, but hey, I think I had an interesting idea.
The bearings that I've made/found are quite complex to get it right in a simple 3D printer, even harder to calculate how much load these pieces would sustain.
However, I was thinking on actually using a mix of biomimicry and tensegrities.
In broad terms, the idea would be to make ligaments using a lot of metal wires attached to simpler versions of bones. This way I could keep the costs lower and still be able to calculate the overall forces the structures would be under without any kind of simulation.
Think of it more like a woven wood structure, but with other materials, such as steel wire or fishing line.


Now mix in with a bit of biomimetics:


Of course, maybe.
Maybe it can work out, maybe not.
... Maybe I'm just being lazy so I don't have to actually mess with these simulations...

-----------------------------------------------------------------------------------------------------------------------------------------------
Now, one week later, now that I'm finally making something, I find out that Blender is a terrible program for exporting valid 3D models for Finite Element Analysis.
As such, I think I will just make a simple cylinder with the general dimensions of the bearing and check if it would be able to withstand the loads.
Well, I tried my best but I could only make this ugly ass thing you are looking at:

Plus, you have to input the pressure as KPa instead of newtons or MPa, which confuses me because I need a value to translate to KPa, and the only value I had was kilonewtons.
30,000 Newton meters = 30 KPa
And in the simulation above, I used a 100 KPa load, which I don't know if it will suffice.
Well, I used the data of PLA instead of HDPE because there isn't data for HDPE on FreeCAD, but apparently, PET and PLA have better tensile strength than HDPE.
Which puts into question why the actual crap would I use HDPE?
I mean... HDPE ropes are rated on the range of 6 tons... Why we don't see these kinds of ropes made out of PLA, PET and others...?
Well, I tried to convert Kilonewtons to kilogram force per cm², but it assumes that is kilonewtons per square meter.
Which would be around 300kgfcm² = 29419 KPa
I added the new value and everything was alright.

(There is an "nm" there, is Newton Meter or other measurement unit?)
Maybe this means that if I want to know how well this thing will survive under bigger loads, I would need to make everything again from scratch but on FreeCAD...
... Right now I'm really not in the mood...
I was thinking here... I think it would be for the best if I simply abandoned the rollers in the slew bearings and used a similar approach to the slew bearing video in the begnning of this project log.
Basically two disks with flat connections instead of rollers/bearings and a layer of low-friction material such as PTFE.

Something like this, I think.
This way would be easier to 3D model and simulate on FEM and on top of that, it would be relatively stronger.
The only problem would be post-processing.
I would need to make the pieces a little bigger than they actually need to be in the friction areas and then sand it down until it has an ideal surface.
Or just make something like this:
-----------------------------------------------------------------------------------------------------------------------------------------------
Returning to the subject of biomimetic artifcial exoskeletons, while imagining how it would work out, I keep running into the problem that I would need to make an entirely new anatomy for an exoskeleton.
The human skeleton wasn't thought to have something inside of it, so I can't take it on 1:1, but I was thinking on certain parallels.
For example, the problem of misaligment between the human joints and the joints of the exoskeleton.

Let's say, if you add an artificial femur to the side of your thighs, it would perform the rotation in the front direction pretty well, but it wouldn't be able to rotate on its own axis, that is why you wouldn't be as mobile as simply using slew bearings and such.
However, I was thinking that maybe one could use the same principle of rotation of the forearm/wrist.
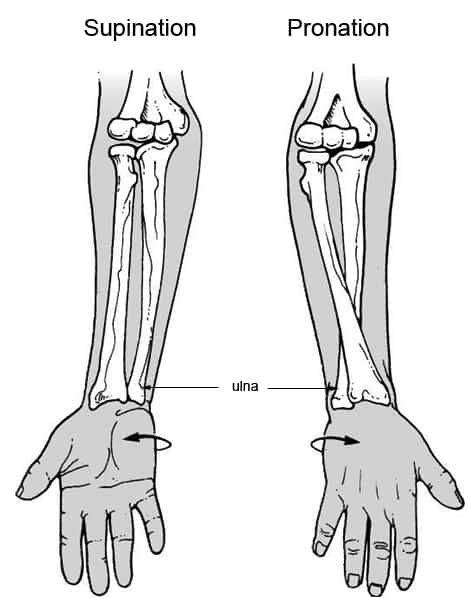
The idea would be to add two or more parallel artificial bones that could rotate just like this, allowing the user full range of movement without the need for bearings.
... Hyphotetically.
But the positive of this is that I could test it out with cheaper materials and easier manufacturing than bearings...
... If I stop procrastinating...
But I still think that I could use that idea of linear guides in a stewart platform configuration for the thighs and shoulders, but I don't know how well those would peform.
Right now I'm divided between the idea of an angled bearing exoskeleton, a conventional bearing exoskeleton, a biomimetic exoskeleton and a linear guide exoskeleton...

All options have their own pros and cons, but I think I should at least rule out the biomimetic (exoskeleton, endoskeleton can use it) and the angled bearing exoskeleton.
These are the most complicated to do, even though the biomimetic would be the cheapest to make.
I say this because how the hell you would be sure every joint is properly attached? How you would be sure every load was properly distributed? You would be on the blind in the case of the biomimetic.
Now the bearing one you can know for sure what is wrong, what is right, and can still make it adjustable for every user.
I could also use a mix of the linear limiters and conventional bearings exoskeleton...
... I'm starting to think that maybe that I should try making the mech suit first... I wouldn't need to worry about not killing whoever is inside of it... But both are equally hard on their own right...
To be honest, neither option is the best, because I still didn't solve the actuator's problem.
I either need an absurd amount of small electric motors to act like "pulley-muscles" or waste an equally absurd amount of efficiency in a central pump driven by a single engine/motor.
I need to find a way of using the elecstrostatic/dielectric/electroosmotic pump...
Just digging myself in this stupid rabbit hole...

-----------------------------------------------------------------------------------------------------------------------------------------------
How I will even make it adjustable for everyone...? Ugh...
I swear, I will try start these new bearings tomorrow.
-----------------------------------------------------------------------------------------------------------------------------------------------
Off-topic:
I don't know if I already talked about this in previous project logs, but...
Basically, some metals such as aluminium and titanium weld with itself under vacuum, their atoms simply chemically bond with each other.
So I was wondering if it could be possible to use this in a manufacturing process, basically, taking titanium powder or aluminium powder and mixing with graphene (or other materials, such as carbon/glass fiber), putting everything under vacuum and hot pressing everything with an hydraulic press.
I wonder if it would be capable of actually coming closer to "cold"-weld everything together...
-----------------------------------------------------------------------------------------------------------------------------------------------
By the way, I was checking the numbers and it seems like I would need 3 times more energy to make the artificial muscles to go into the same velocity as the real muscles.
For example, the biceps brachii muscle has a lever arm that is approximately one tenth that of the center of mass of the forearm and, thus, the muscle needs to generate a force over 10 times the weight of the forearm in order to produce elbow flexion. It has subsequently been proposed that muscle-derived forces are the primary source of mechanical loading that generates bone strain [8, 9].
Source: https://www.ncbi.nlm.nih.gov/pmc/articles/PMC4306629
Basically, the mechanical disadvantage that I was planning was one-third, in other words, if I apply a force at a speed, I would receive 1/3 of the force and 3 times the speed at the end of the limb.
However, since the disadvantage of human muscles is 1/10, this means that it applies a speed and a force that is divided and multiplied 10 times.
Human muscles reach a speed of 40cm/s, just like my artificial muscle, but it receives a boost of 10 times its original speed.
But mine only receives 1/3 of the speed, meaning that in order to compensate, I would need 3.33 times more speed to compensate.
Force x Velocity = Energy.
I can replace hydraulic artificial muscles with thermal artificial muscles, which are the best in force per weight (around 10,000 times its own weight), but supper slow and inneficient, just like the real deal. Plus, the one that I intend on using has a linear speed of around 40cm/s also.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
I'd assume that the material is something Igus themselves made. They also make self-lubricating FDM 3D printer filament.
Are you sure? yes | no