Well, 5 of may will be my birthday, I hope someone suddenly appears out of nowhere with a free complete 3D CAD model of a mech... (as if).
Well, I don't really need to 3D model every gear set that I would need to use, but I do think it would be the best course of action taking into consideration my specific parameters.
For example, there are a lot of planetary STL 3D print reduction gears, but all of these use helical designs and don't take into consideration the low tolerances a 3D print has. So, basically, all of them can be really inefficient because 3D printers suck at precision printing, but none of them are concerned with that, because they simply make simple and small DIY projects.
So, I will need to find spur gears in various sizes and shapes so I can both use it on a 3D model and still being able to build it in real life.
Funniest part is that there are actually a lot of planetary spur gear reduction box STL files around the web...
Like this 40:1 compact gearbox.
I think I would only need to make the gears longer in order to be able to take more weight, or simply scale the entire model on blender...
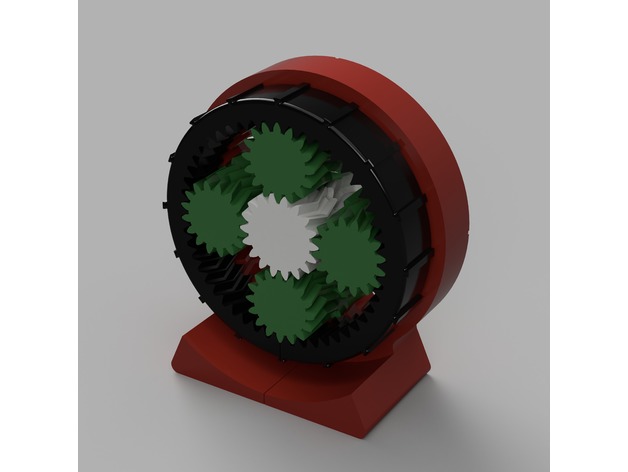
There is also this one, although I don't know what is the reduction ratio (it says it is 6:1), it is a very solid design.
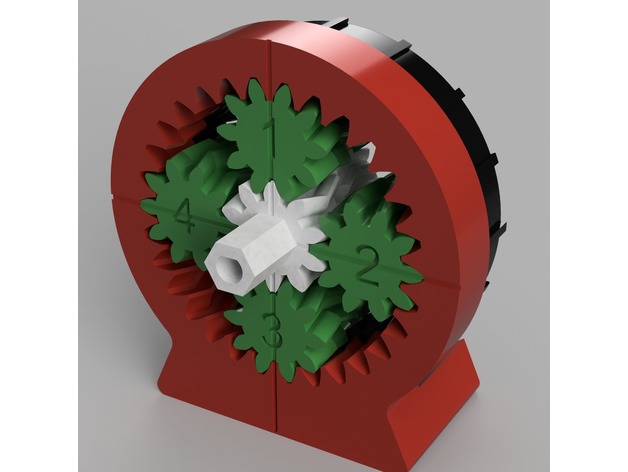
Well, I put the tooth numbers of these planetary gearboxes and I got maximum 4:1 in the first planetary gear, not 40:1, and 6:1 on the second.
The only planetary gear boxes that I can find that reach 100:1 gear reduction are like this, using helical gears and complex structures that I can't possible replicate with a simple setup like mine.
Well, since the last gear is a 35cm wide sprocket gear has 48 teeth, and the stages have a reduction ratio of 6:1, I divided the rpm value (36392 rpm) by 6 two times, until it achieved 168.481481481, then a 5 teeth round gear (like the used in the video of the rotary hexapod) that then it would achieve around 17.55 rpm.
Although the last stage kinda makes me confused... I mean, if you drive a bigger gear with a smaller gear, you get gear reduction, but since the smaller gear is the part that rotates, like in the hexapod case, doe sit get the same reduction gear? 😵💫
I will assume it does.
It looks a little bit better, kinda chonky tho...
Well, I tried to put it in a somewhat humanoid manner without everything crash on one another...
It seems like the hexapod idea won't work...
Winch/tendon mechanism it is...
Of course, I tried other way around, but it is just... Too large, I believe.
Those high ratio red/green/black/white gearboxes are compound planetary. As I mentioned in my comment on the previous log, they operate on the same principle as Skyentific's orbital drive, but give more options since you're not limited by available belts. It doesn't matter how many teeth there are, only how close the ratios of the two halves are to eachother ("one minus the ratio of the ratios"). And those are the type that's driven by a sun gear rather than the carrier, giving one more stage of reduction (and associated efficiency loss and backlash), and decreasing the planet RPM which allows a little higher torque. Those actually don't have a carrier at all, which does work but is not ideal because the planets tilt sideways a little bit and put uneven force on the teeth. The sun gear on the output half doesn't participate in the reduction at all, it's just a spacer to keep the planets from tilting inward. It's unnecessary if you have a carrier.






Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Those high ratio red/green/black/white gearboxes are compound planetary. As I mentioned in my comment on the previous log, they operate on the same principle as Skyentific's orbital drive, but give more options since you're not limited by available belts. It doesn't matter how many teeth there are, only how close the ratios of the two halves are to eachother ("one minus the ratio of the ratios"). And those are the type that's driven by a sun gear rather than the carrier, giving one more stage of reduction (and associated efficiency loss and backlash), and decreasing the planet RPM which allows a little higher torque. Those actually don't have a carrier at all, which does work but is not ideal because the planets tilt sideways a little bit and put uneven force on the teeth. The sun gear on the output half doesn't participate in the reduction at all, it's just a spacer to keep the planets from tilting inward. It's unnecessary if you have a carrier.
Are you sure? yes | no