Monday, 15/05/2023, 08:20
Edit³:
Just now I noticed that my calculations on the amount of torque (and thus, energy/wattage) required were incredibly wrong.
I didn't check everything fullly yet, but I believe that I would need actually 300 watts per joint/actuator. At worst, 2kw.
__________________________________________________________________________
I think I should add the date of the day I publish the project log, I feel like it could be interesting for giving an idea on how long I've been working on something...
I'm publishing this on a wednesday, by the way, 2 days after I created the project log.

Anyway, there is no way around the problems when it comes to the Mech itself, it is just too dang expensive and too dang heavy.
I think I should (finally) be following other people's advice on the subject and start with the exoskeleton.
(Actually their advice was to start small and simple, not complex like an exoskeleton, but I will ignore that until it comes back to bite me, lol)
Joints and Actuators:
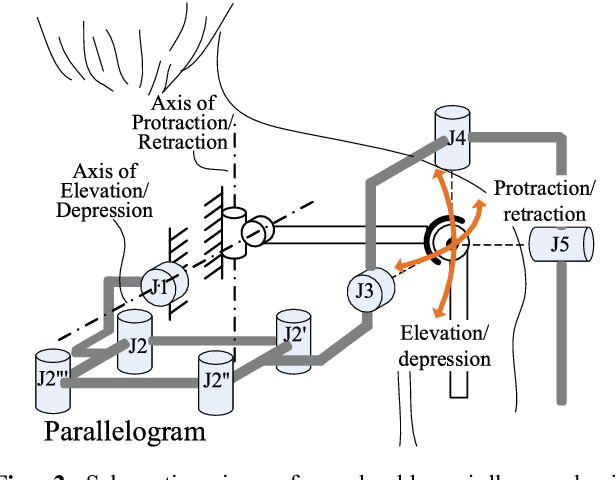
So, the first problem one can spot with an exoskeleton is the misalignment between the electric motors axis of rotation and the body axis of rotation.
Well, I couldn't find anything that illustrates that, but I will try to illustrate it on paint.

I hope it is clear from the image itself.
But anyway:
since the exoskeleton is outside of the human body (for obvious reasons), simply attaching the actuators at the same positions of the joints won't allow the exoskeleton to fully follow the human body's movements.
Of course, some parts of the body are kinda simple, like the knees and the elbows, since these joints are fairly simple.

But still, in some areas, like the shoulders, the torso and the hips, you will need to construct the exoskeleton like its axis of rotation is inside the body.

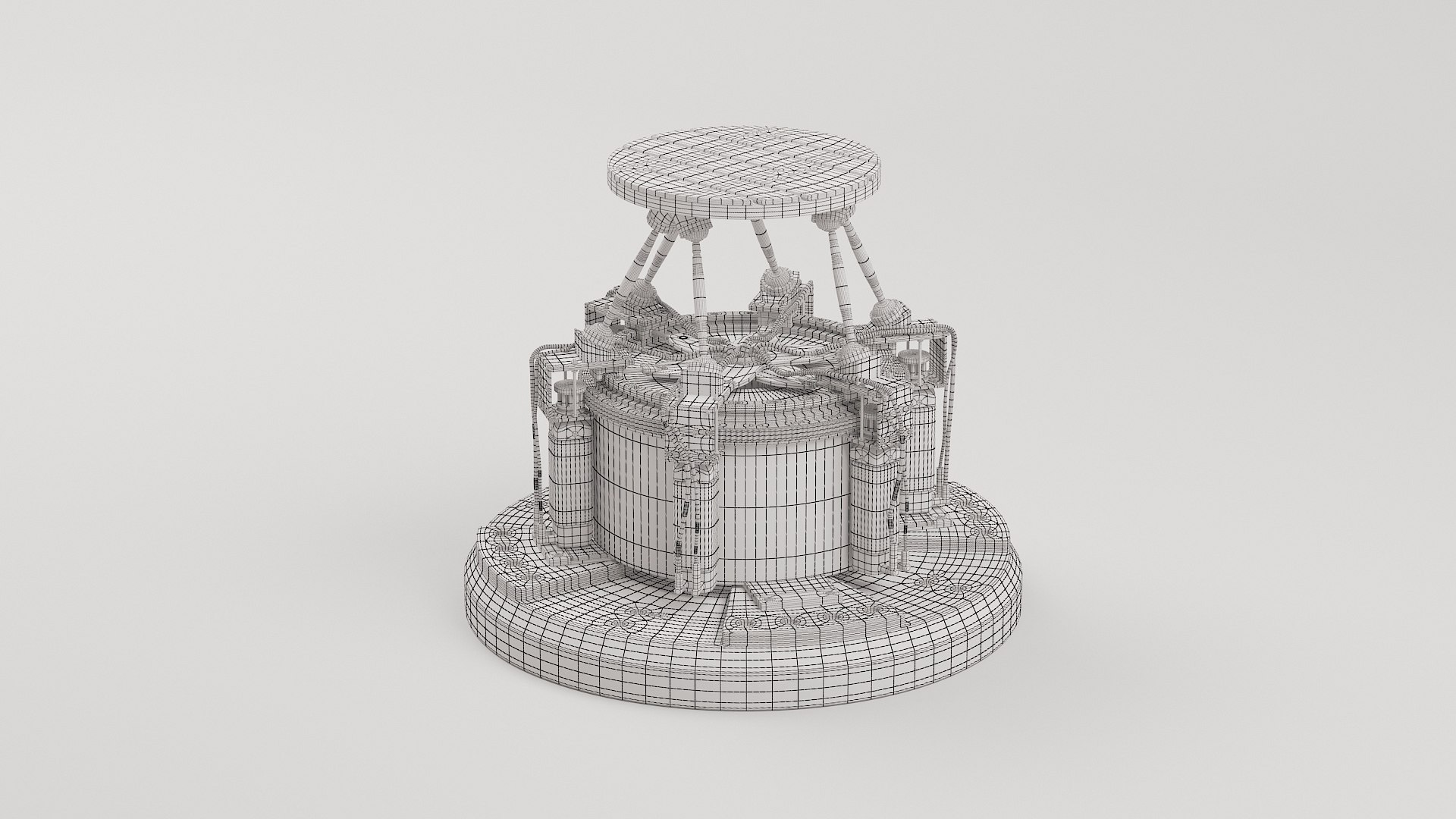
For example, using some kind of mechanism similar to this ring rotary platform in some areas.
Although I get a little concerned because it looks a bit too bulky and I can totaly see it rotating beyond the human limits and dislocating a bone or two, so I would suggest an "open ring configuration", if such thing exists.
Another way of getting around this is using linear actuators, but the conventional ones (like the screw type) have too much friction (or so I heard). But there are other ways around it:
This stewart platform uses the rotary action of electric motors to make a linear action.
Now, this one guy attached a rod to a timing belt and the movement of the timing belt propels the rod forward.
Although now I need to figure out the speed/rpm of the motor for the linear action and the linear action to rotary action again. 😵💫
Or I would just use the open ring configuration and not have to deal with it...
Well, I found the split ring thingie, now I need to add gear teeths to it.
... Or I could just put a little block/limiter on the parts of the body...
Sometimes I think too complicated solutions to problems that can be so simple to solve...
I also need to figure out a way of making the exoskeleton modular/adjustable on the linear parts for every body type...
Well, I did find one exoskeleton that have all the correct degrees of freedom of the shoulder and it doesn't have all the fancy thingies I previously suggested.
Although it is a medical exoskeleton, not a "power armor" type, it doesn't even have torso movement.
The only "problem" I have with that is that it has around 5 motors on the shoulders with the same amount of energy doing different things (I think).
You could have reduce that if you used the rotary stewart platform configuration where all actuators are working together.
Yes, it was just too bulky for a mech, but I think it could be a different story for an exoskeleton.
Potency and Power of Electric Motors:
Anyway, assuming that we need 300kgfcm (or 30 newton meters) of torque on each joint in order to lift 100kg (the weight of the user/pilot) and 30 rpm of speed, we would need around 94 watts of potency.
Triple that so it can lift 300 kg, and thus, need three times its torque, around 100 newton meters (or 1000kgfcm), so, 300 watts of power, around half a horsepower per electric motor.
On the shoulders and/or the hips you would have 6 electric motors working together, and thus, needing at best, 50 watts per motor.
You can find these 50 watts electric motors in the cheap.
Even if I used 400 watts electric motors, I would still use less than 1000 bucks for the legs alone (if I didn't use the rotary stewart platform).
The best part is that the electric motors I would need in this exoskeleton can be drone electric motors, these are super small and light, but have more rpm than torque, which would need a reduction ratio by either timing belts or reduction gears.

Well, taking into consideration the dimensions and capacities of this specific motor (link here), I would have 12210 RPM and 0.0782 Nm of torque at 100 watts.
And thus, I would need around 20:1 or 25:1 reduction gear ratio in order to achieve around 592.5 RPM at the end of said reduction in order to rotate around the rotary hexapod I posted in previous project logs.
Of course, these numbers will change accordingly to your setup and so on.
I think I will be using this 3D print file of a reduction gear, I can just copy the big gears and the smaller gears in a 2D print, cut it out of a medium and then glue both together.
Sigh...
This looks so stupid...

Why do I even keep insisting on this stupid idea?
It is so beyond my skills...
Well, I did find the R-3000 Rotopod 3D model online here, but it is paid; it wouldn't be a problem if I didn't want this project to be open source.
Edit¹:
But I was wondering if I should instead do "stewart legs" instead of correctly anatomical exoskeleton.
An example:
(there are better videos showing the WL-16)
Basically, it uses stewart platforms as feet-legs-knees-hips.
It is not as cool (and awesome) as walking exoskeletons, but it does the job (I think).
I say "I think" because I really can't see this thing stepping upwards...
Stewart Platforms are really versatile, but these don't have that much maneuverability (as a leg).
Edit²:
I think I will use this kind of actuator on the shoulder/hips because of the limitations of the stewart platform, specially because there isn't much space on the human chest for a long linear actuator.
Yes, these have a lot of friction, but I don't know any other mechanism.
(there is a link in the description with the files of said actuators).
Actually, I found a version with gears:
Also, I don't really need the screw drive, I can just use the rack and pinion on its place.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.