An initial prototype of the project began, where the main components of the actuator and the preliminary design to be used were established. This can be seen in the following image:

For this prototype, it was considered to use a brushless engine and the implementation of rotary encoder was not envisaged.
After this, and working for the presentation of advance, it was that a more definitive design of the prototype was made, where you can see that there is a breakthrough in both design and the problem of its operation:
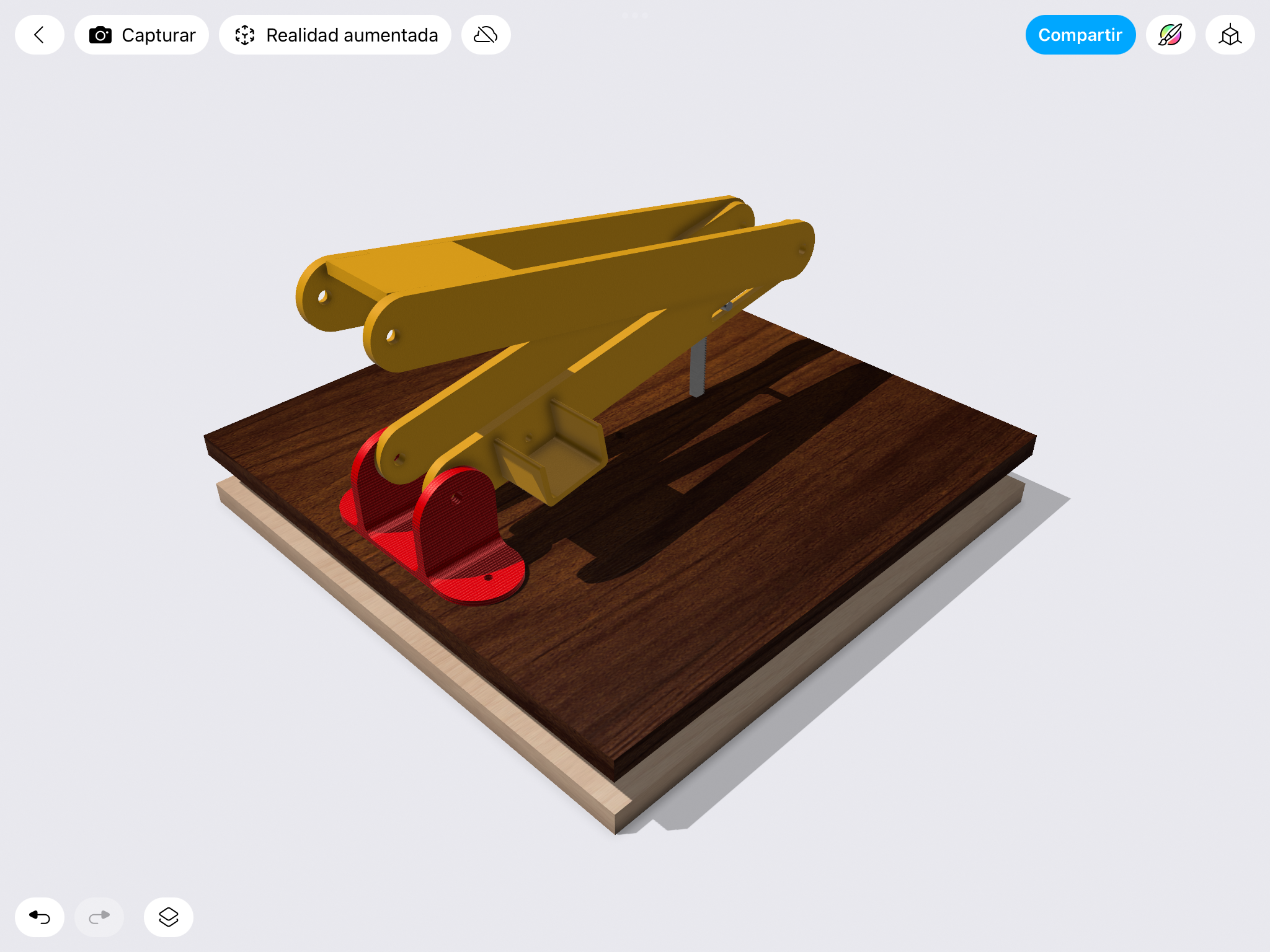
Here you can see that you consider a space to place the brushless engine added to a surface where the ball will be placed to launch. The full approach of rotation of the platform was not yet developed, but if it was planned to implement it.
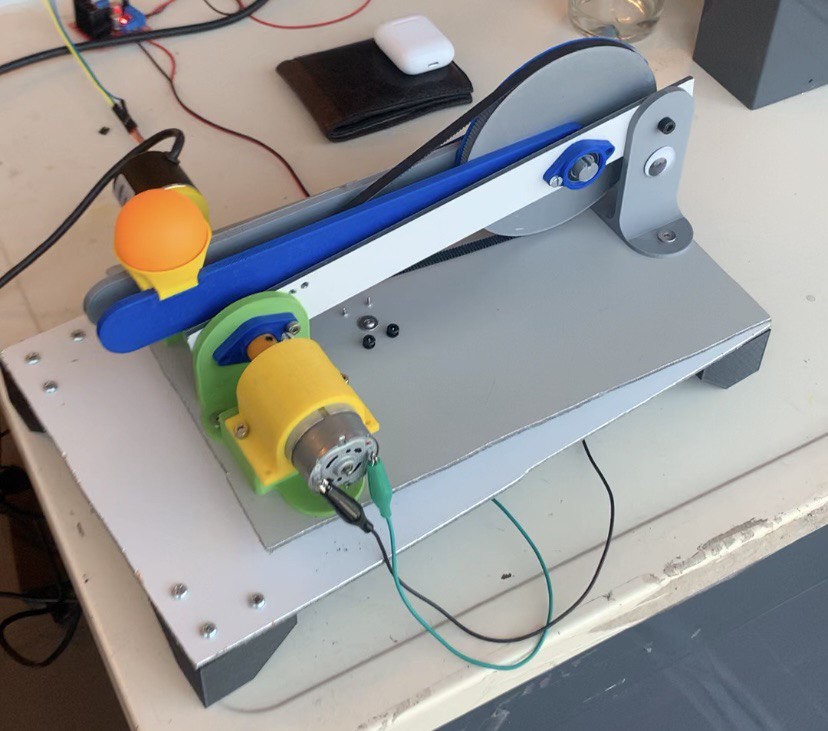
For the final model of our project, a rethinking of the components to use was performed, within this you have the change of the engine to use from a brushless engine to an dc engine, this due to tests performed and the behavior of the manipulator in them. In addition to this, a rotary encoder, capable of turning the axis turn into a signal, this would allow us to know the point where we want to stop the engine and return to its initial position. In addition to this, the structure continued to be improved; adapters for both encoding and dc engine were designed. The last thing that was worked was on the lower turning platform, this would allow to move at work angles and expand the launch spectrum.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.