 peter jansen
peter jansenI thought I might post my first attempt at creating a (very low resolution) programmable matter robot voxel, in the shape of a cube.
The concept is as ridiculous as it is simple: have a cube that contains (a) a telescoping linear actuator that can lift the cube bot higher than other cube bots, and (b) an X/Y stage that allows moving the cube relative to the actuator, so that (when lifted up), the cube can essentially move itself over to be on top of a neighbouring cube.
The current prototype isn't quite there, and has a number of issues that I'm not entirely sure how to get around:
- The actuator isn't quite there: it's a little too long when compressed, and a little too short when extended.
- There isn't a lot of room left at the top of the cube (about 15mm) to create the X/Y stage. I was able to fit one stage in, and could likely fit in another stage, but it's harder than it should be.
- I had initially planned on having a series of movable counterweights at the top of the cube mounted on a rotary stage controlled by some servos, to help the cube keep it's balance. But with only 15mm of head room for the X/Y stage, there isn't currently enough room -- so I just manually balanced it by strategically placing a counterweight (a box of screws...)
Challenges to going forward:
- It's quite challenging to create a telescoping linear actuator that achieves more than twice its own height, while also being compact and inexpensive.
- The linear actuator likely would need to achieve 3X its own height, to allow for headroom for the X/Y stage, counterweights, etc.
- Even if the design worked perfectly, it'd still require that one face of the cube (the bottom face) would be open for the actuator to extend out of -- which is non-ideal.
- Given all these issues, it's more of an interesting prototype rather than a real likely contender to be able to function as intended.
---

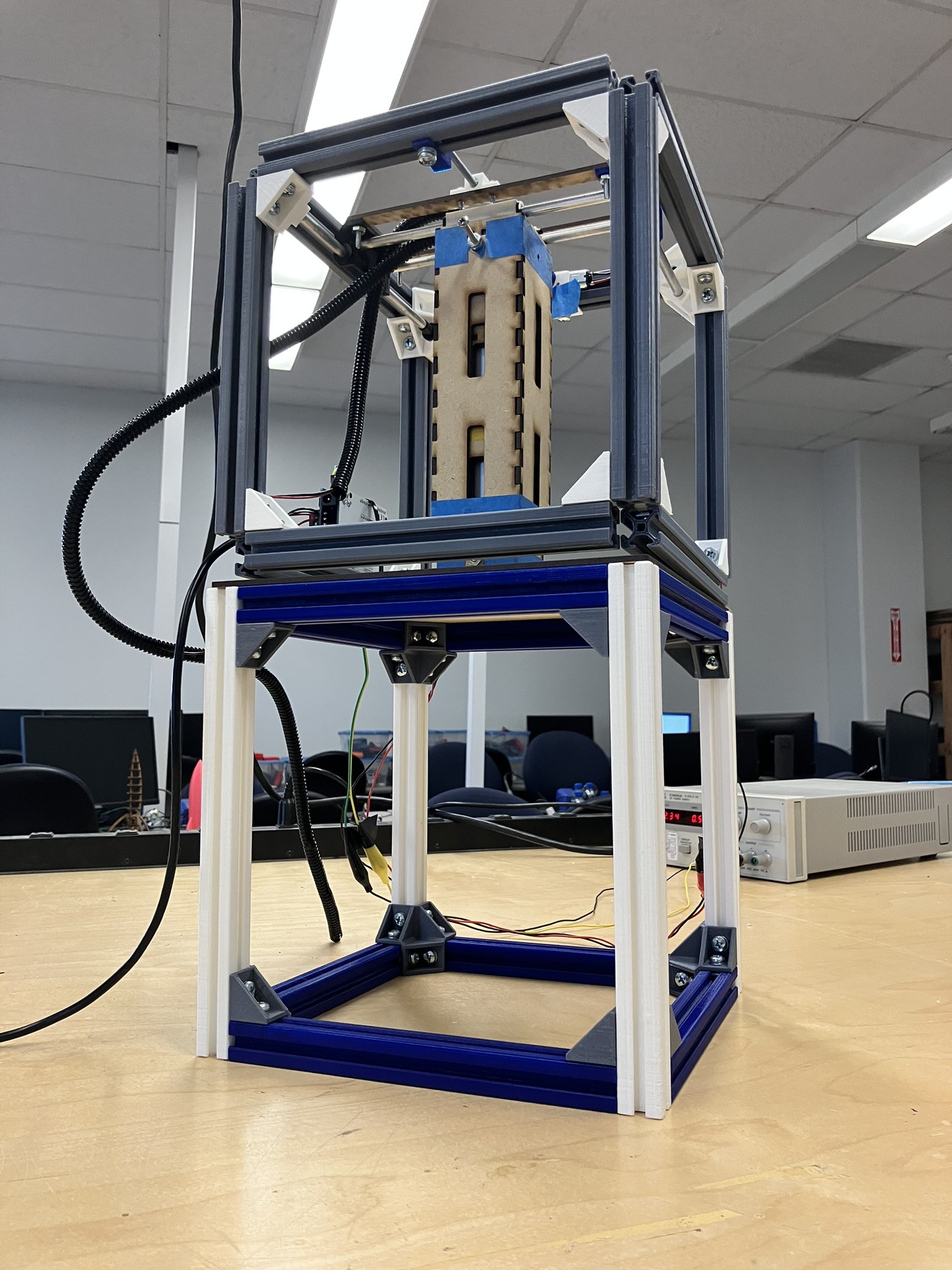
The idea started off with the cube above -- a 240mm (approximately 10 inch) cube, with a linear actuator mounted on an X/Y stage. Of course, the issue with the version above is that the actuator is too short to lift the cube higher than itself -- so it needs a different, telescoping actuator. I cobbled a quick test together, by cascading two linear actuators together:
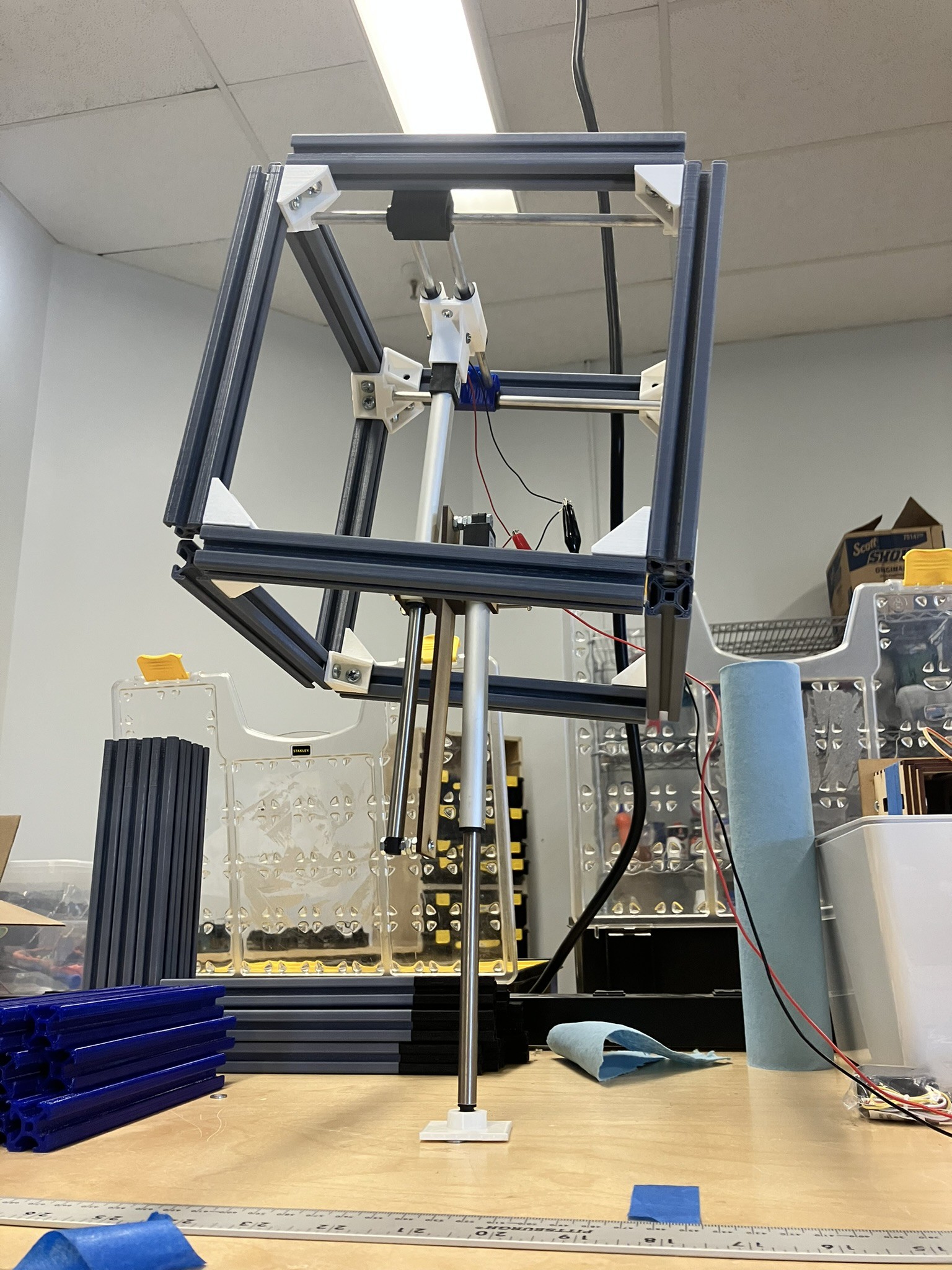
And, aside from the obvious wonkiness, it appeared to work -- the cube had lifted (just barely) over its own height. Immediately after taking this picture the cube fell over and destroyed both actuators, so it was clear that they needed to be properly enclosed in a telescoping mechanism. I designed a quick series of telescoping square tubes, that use Kapton tape to decrease their friction. When contracted, the mechanism is about 210mm high, while when extended it reaches about 440mm -- more than twice its length. 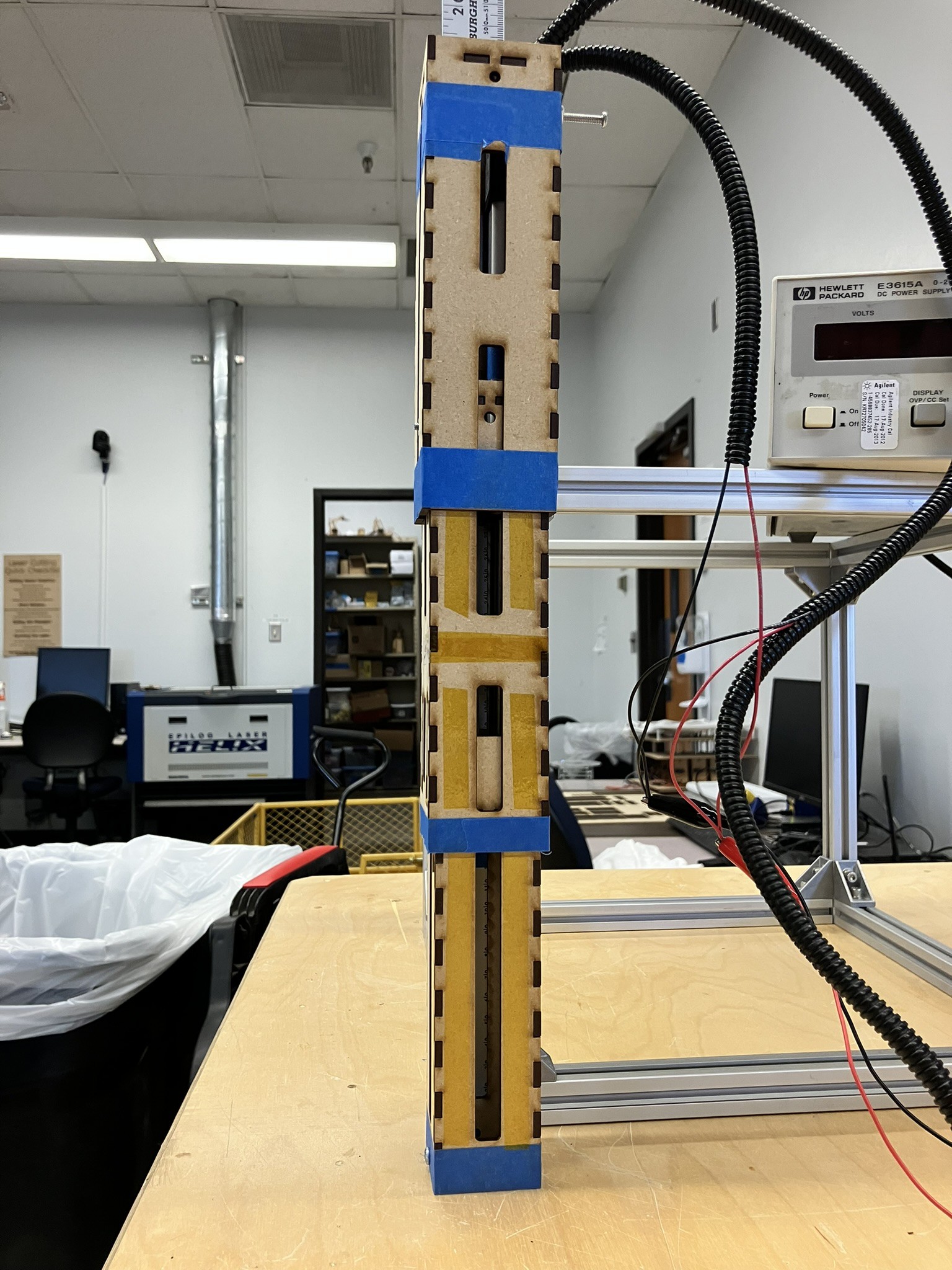
Below is a view of the inside of the telescoping actuator, which is just the two actuators mounted side-by-side. The telescoping square tube has three parts (top, middle, and bottom). The left actuator is mounted to the bottom and middle parts, and the right actuator is mounted to the middle and top parts. When they're engaged, the actuator extends. 
I mounted the telescoping actuator to an X/Y stage that's largely 3D printed. To test the idea for testing in the video at the top, I populated a DC motor for only a single stage.

After having this idea in my head for some years, and finally testing it, I think it's unlikely to work particularly well unless a bunch of things changed (like, the availability of inexpensive telescoping actuators that can extend more than three times their compressed length). But, even if it were to work perfectly, my sense of things is that there are enough limitations that there are likely plenty of ways to accomplish the task better.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.