 David
DavidBackground
FRC (First robotics competition) is a High School program built to promote STEM education. The students build 120lb robots to compete in a new challenge every year. The robots themselves cost thousands of dollars so each team typically only builds one. I want to provide a cheaper alternative to allow for more hands on learning and development.

This project has two main objectives:
- Create a large format, low cost kit
- Teach students skills they need to build competitive FRC robots
Skills to be taught:
- Safe use of power tools
- Read and understand part drawings
- Assembly practices and trouble shooting
- Basic electricity concepts (Voltage, Current, etc…)
- Wiring
- Basic drive code using WPI library
See update log #1 for what the initial lesson plans would be.
Kit components
The following describes the target components to be used
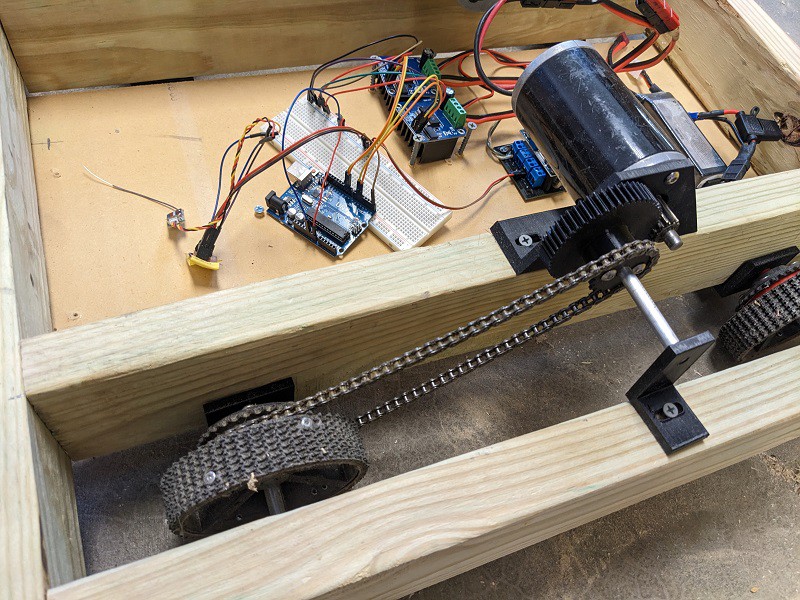
Frame
- 24"x 27" frame built with 2x4s
- Easy, cheap, sturdy. Components needing higher precision will be 3d printed
DriveTrain
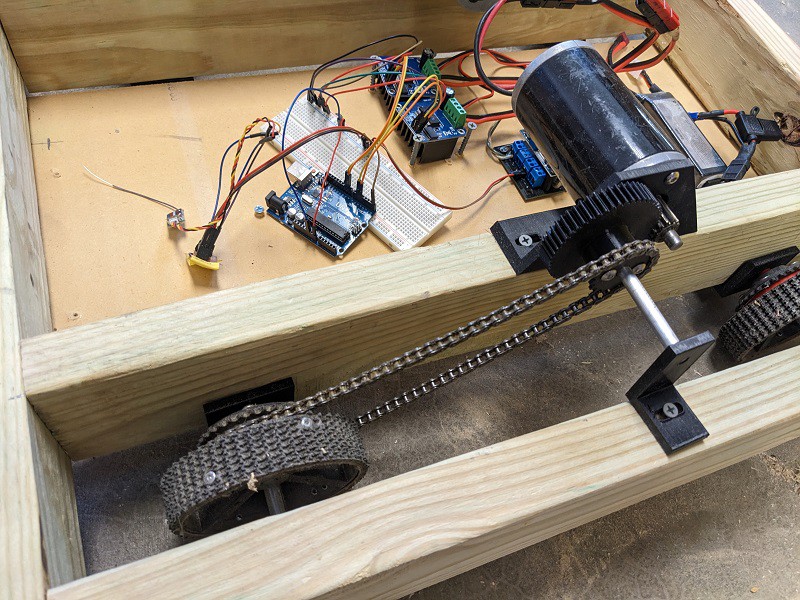
- 4 4" wheels on deadaxle
- Dead axle referring to the wheel spins on the axle and not with
- Axles are 8mm to make It easy to switch to using cheap 608z bearings later on
- Axle supports are 3d printed brackets
- Have not tested turning on carpet, may need to switch to 6 wheel drop
- 2 12V Cim brushed motors, 7.7 gear reduction
- First stage is aluminum pinion gear->3d printed PETG gear
- Second stage is 3d printed sprockets
- Cims are readily available to FRC teams but may switch to another motor for reduced cost
Power
- 3s lipo
- Readily available on amazon or other RC Hobby sports retailers
- Could easily be switched with standard FRC lead acid battery
- Power distribution
- Custom power distribution board
- Has mounting location for voltage regulator
- Could easily be switched out with standard FRC distribution boards
- Power switch
- 120 amp breaker switch
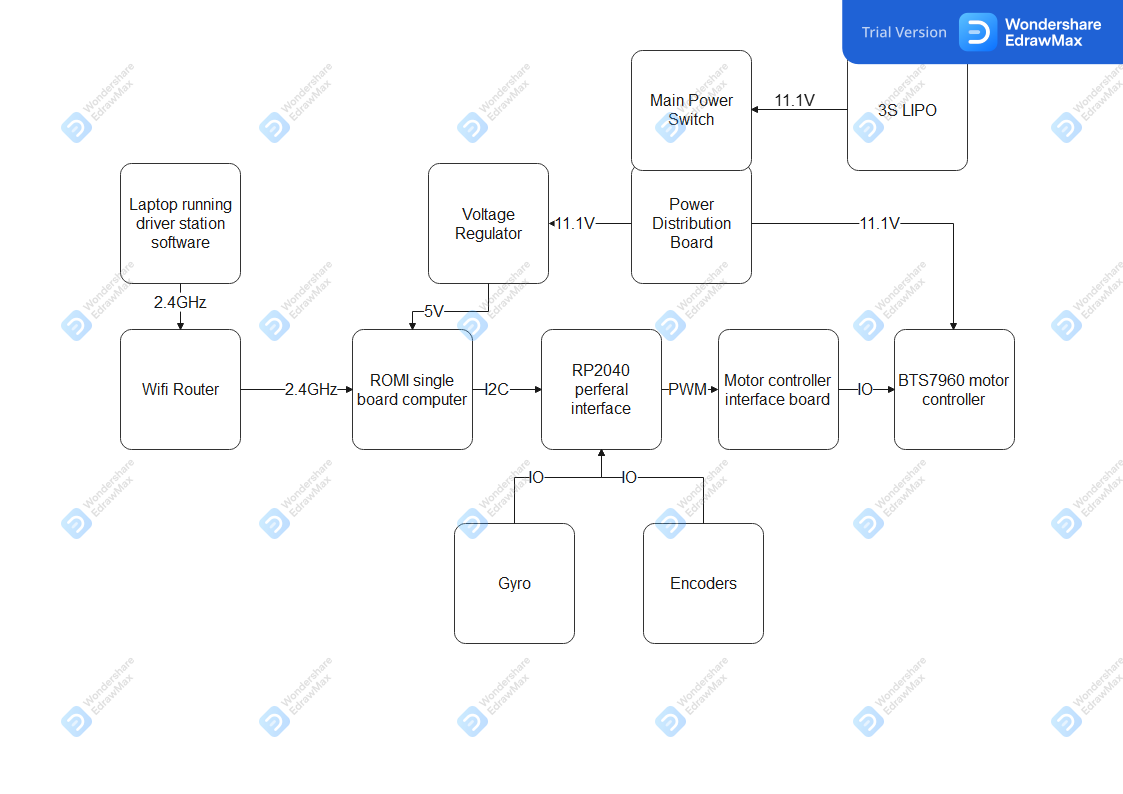
Control
- Linux single board computer running "ROMI" software for main controller
- Standard FRC control system uses a National Instrument's RoboRio, ROMI software simulates that device
- RP2040 for real time peripheral interface
- I2C slave device to single board computer
- Handles communication to motor controllers and sensors
- BTS7960 for DC motor controllers
- High power controller with built in over current protection
- Need a interface board to convert normal RC style PWM signal to BTS7960 control signals



 Darren V Levine
Darren V Levine
 Tobias
Tobias
 Oskar Weigl
Oskar Weigl
The XL Robot Trainer Kit is a comprehensive educational tool designed to introduce students and enthusiasts to the world of robotics. It typically includes a variety of components, such as microcontrollers, sensors, motors, and software, allowing users to build and program their own robots. The kit is often used in academic settings or by hobbyists to learn about the principles of robotics, electronics, and coding. Its modular design makes it accessible for beginners while also offering advanced features for more experienced users, making it a versatile option for anyone interested in robotics training and development. https://homeworkifyofficial.com/