 deʃhipu
deʃhipuHobby servos were not designed for robots – they are mainly for remote-controlled airplanes and boats, and they were created back in times of analog radios, when PWM signal was the easiest to multiplex. While they are relatively cheap and convenient, in that they already contain the drive train, the motor controller and a position sensor of sorts, they are pretty lacking in terms of feedback. Yes, you can add wires to them to be able to read the position of the potentiometer or the power sent to the motor, or even add some current monitoring circuit, but it always requires additional components and the use of additional microcontroller pins, and gets unreliable and tricky when the servos are not powered with stable voltage.
But there are other servos, that were mostly designed for robots and similar constructions. Smart servos tend to be slower, with more torque, two-way digital bus communication, more convenient mounting options and brackets, and general sense of solidity. They however also tend to be rather bulky and expensive, and because I prefer to build small and cheap robots, I never really tried them properly.
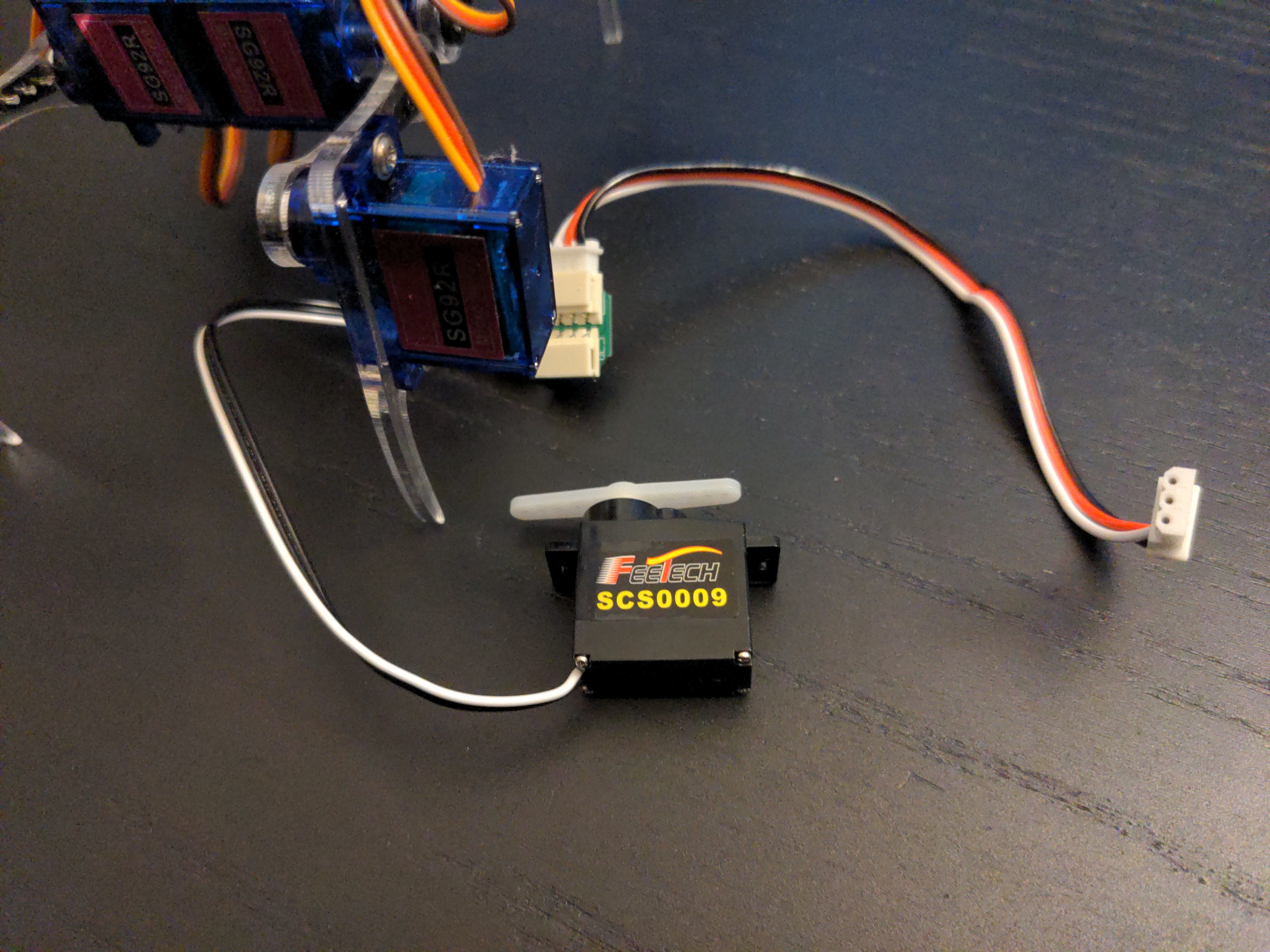
But recently I have discovered FeeTech SCS0009 smart servos, which contain all the logic of a smart servo in a package compatible with a nine gram hobby servo. Of course they are more expensive, but not so much that I couldn't run some experiments with them. And since they are a drop-in replacement for the hobby servos, I don't need to design a whole new robot for them, I can use all the mechanical parts of the #Fluffbug or #Moo Bug, and probably reuse the PCB as well. The only thing I need to implement is the new communication protocol. So that's the plan for now: a version of Fluffbug with smart servos in place of the hobby servos. And we will see where we can take it from there.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.