 elliotmade
elliotmadeHere's a quick look at where we're coming from. After the wheelbarrow POC the project has been on the shelf, this is what we've done recently.
Breadboards
We switched to the ESP32-S3, here are two devkit modules on breadboards:
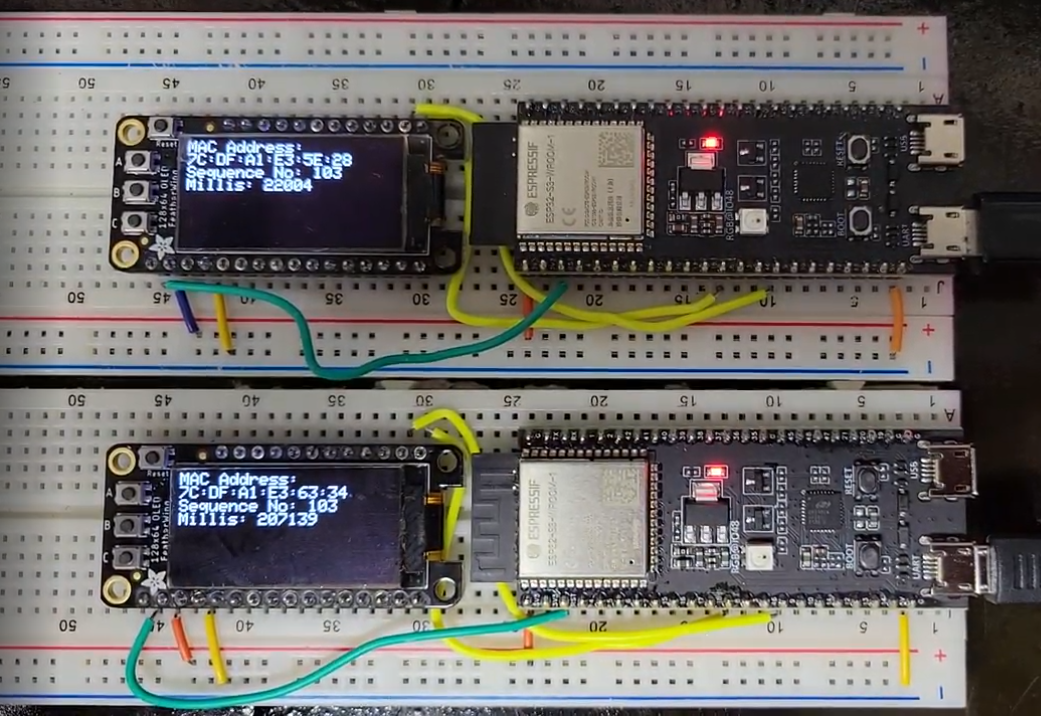
At this stage we have added an OLED for testing - the transmitter is sending a message over ESP-NOW and both modules are incrementing a counter in sync.
Proto boards
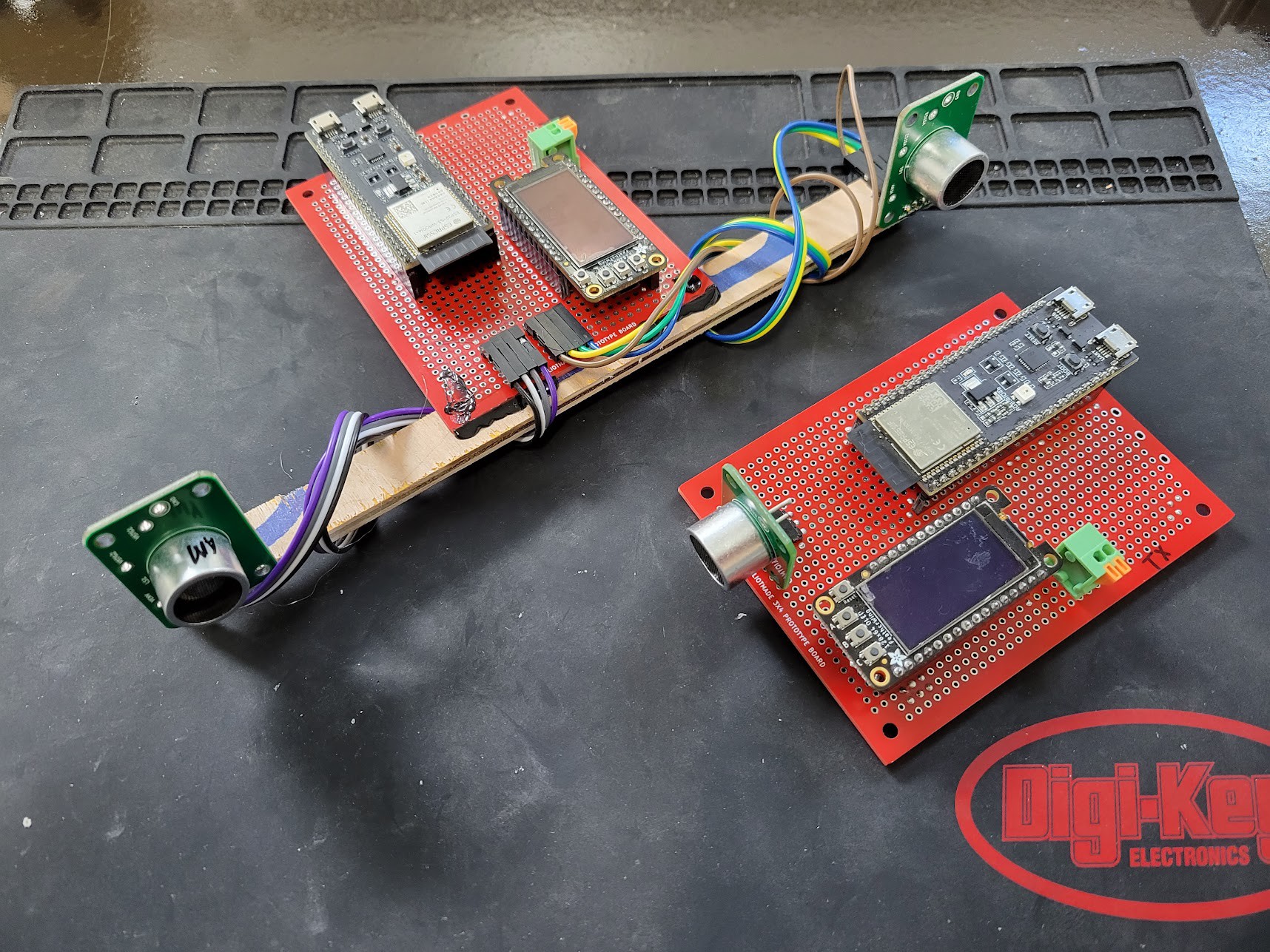
Moving on up, now we have the same modules in a slightly more robust assembly. We have added our first revision of the transmit and receive transducer boards. This setup is functional enough to measure angle and distance, but we found the performance of our receivers is fairly poor; detection falls off around 8-10 feet, as compared to the HC-SR04 module which was reliable to at least 30 feet.
Next revision
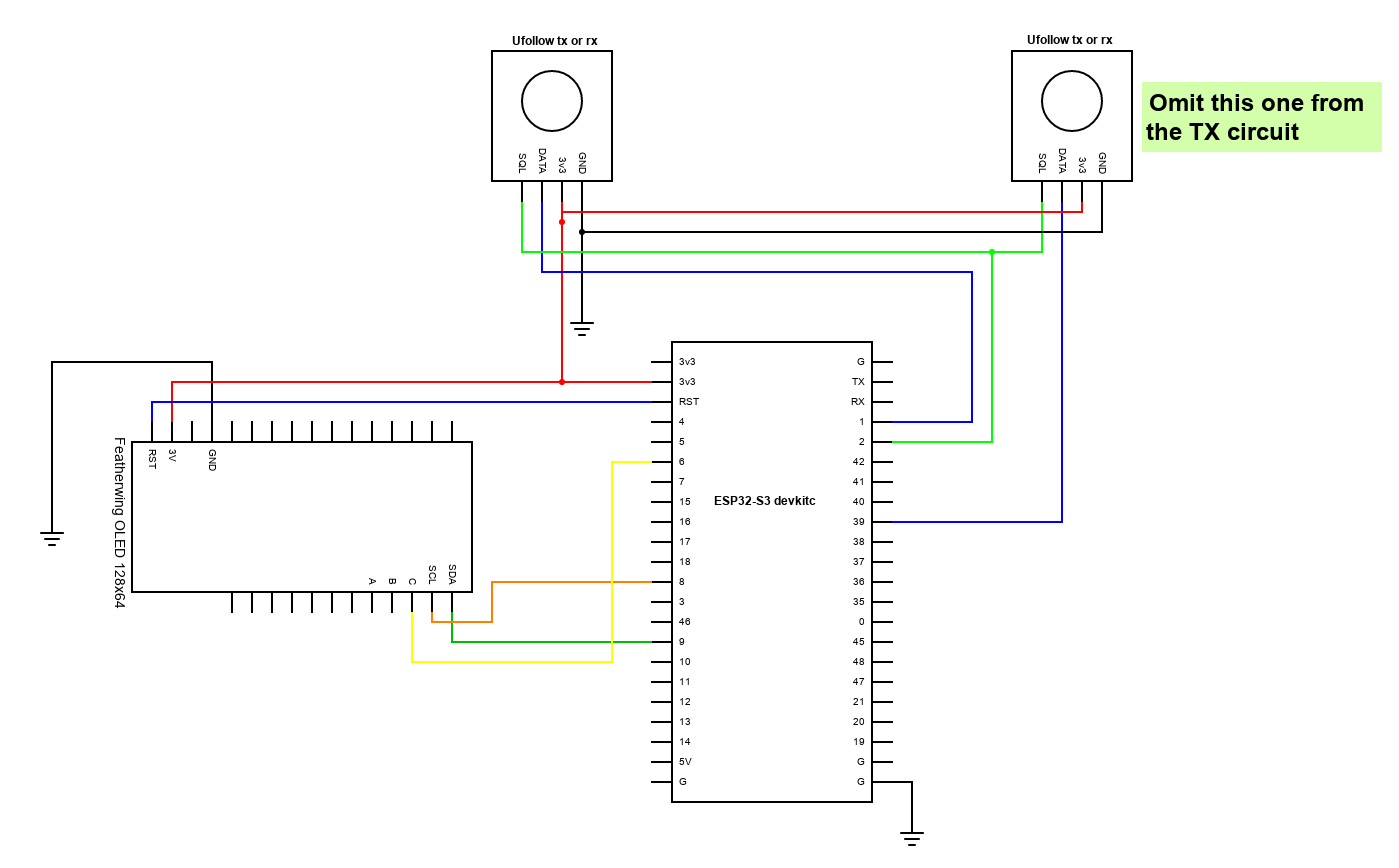
Here we are graduating from the devkit modules, this gives us a chance to prove out or schematic and power supply situation. It adds a few buttons and a RGB LED. For now we are using the same assembly for the transmitter and receiver modules, in a future revision we will have a bespoke design for the transmitter that is suited to run from a battery and is more compact - the display here is still just for testing purposes, we don't plan to include that in our final product.

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.