 Mike Rigsby
Mike RigsbyTo put this together, I have a schematic drawing.

The Arduino sketch (which just makes the machine go forward, reverse, left, right, repeat) is provided in the files.
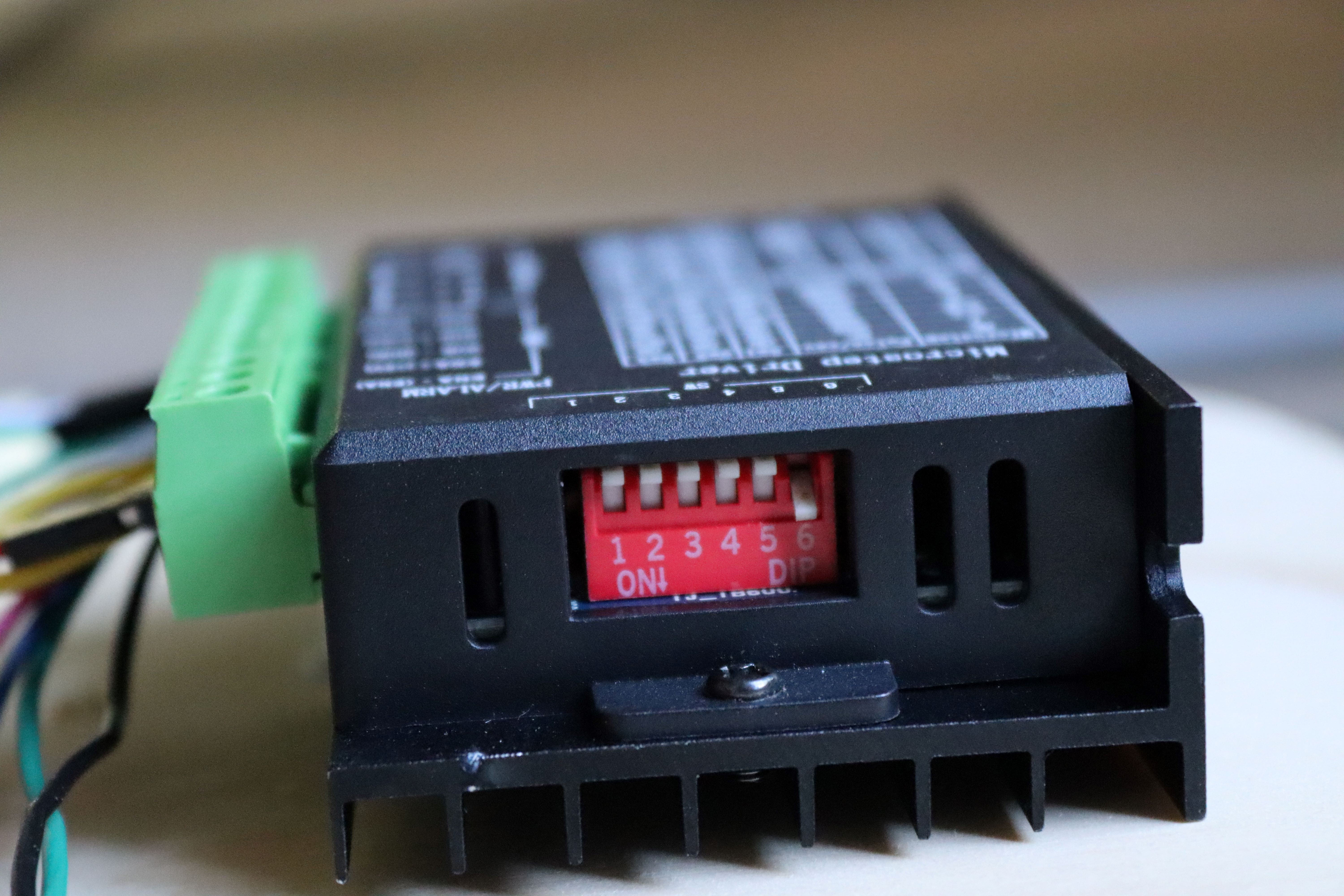
Here is a photo of the dip switches on the stepper controller. It's set for 6400 steps per revolution (I know, that's crazy--but it's smoother and less noisy) at maximum current of 2.8 amps (maximum according to the motor spec). Each motor only draws about 1.5 amps with a 12 volt supply--so I'm just dipping my toes in the world of stepper motors as far as understanding what's happening.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.