 Mike Rigsby
Mike RigsbyNow the movement instructions come from the upper deck--an Arduino Mega.
It was necessary to rewrite the software for the motor controller (stepper control test.ino) and add control lines as well as set up the Arduino Mega on the upper deck.
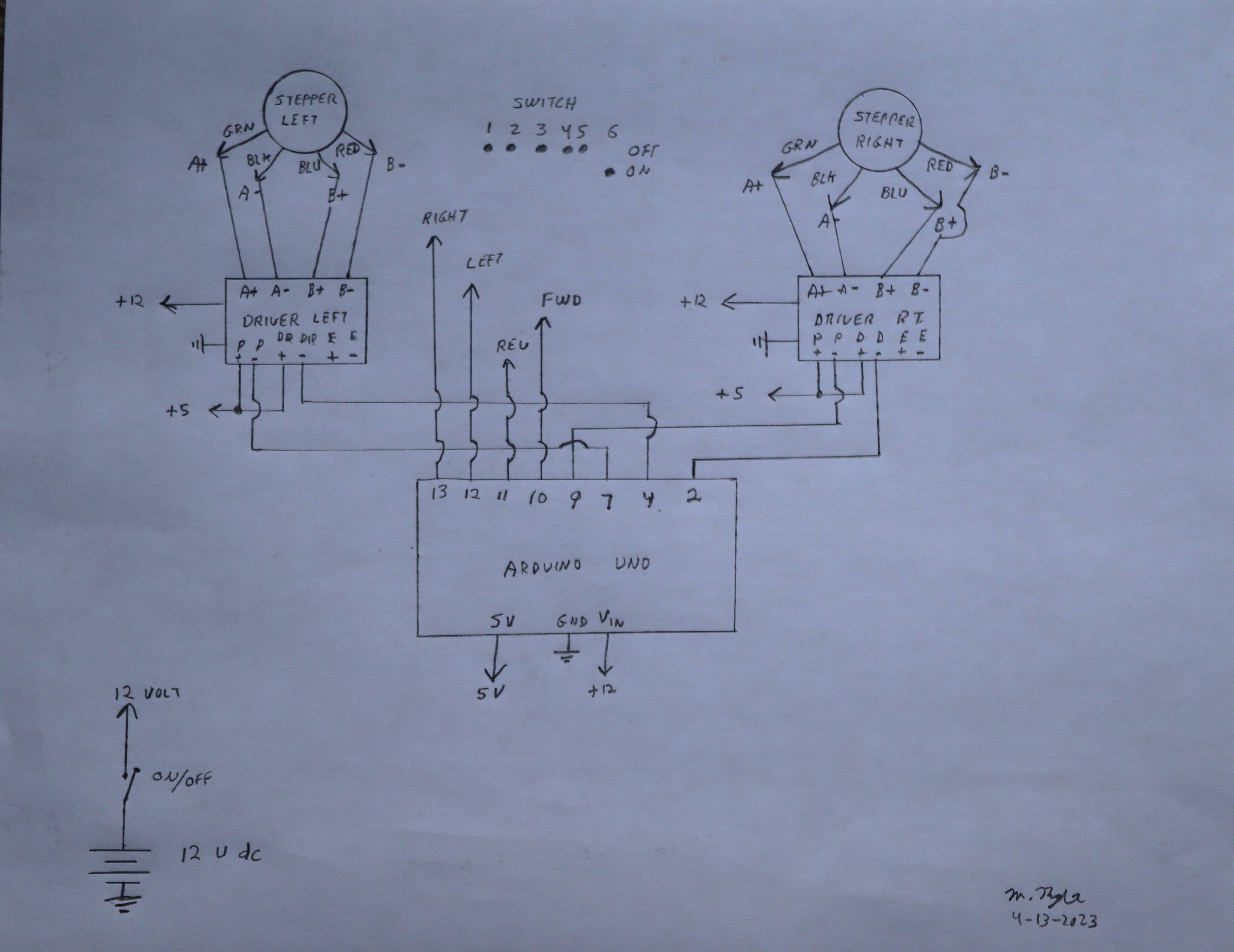
Movement control information can now be written to the upper deck Arduino--which will send control signals to the lower deck.
The current program (homely master.ino) merely goes forward, turns around, returns and turns around.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.