 Mike Rigsby
Mike RigsbyNow, Ozzy will come to me when I say, "Ozzy, come here." I used an 8 x 8 thermal sensor and (another) Arduino Uno to accomplish this. After adding a "Come here" command to the voice recognition circuit, the output of the "thermal sensor Arduino system" can be used to drive the motors forward, right or left. When Ozzy gets near the target (as determined by an ultrasonic sensor), Ozzy turns around and waits for instructions.
Here is the thermal sensor, mounted to the plywood using 3mm screws.

Above this is the ultrasonic sensor.
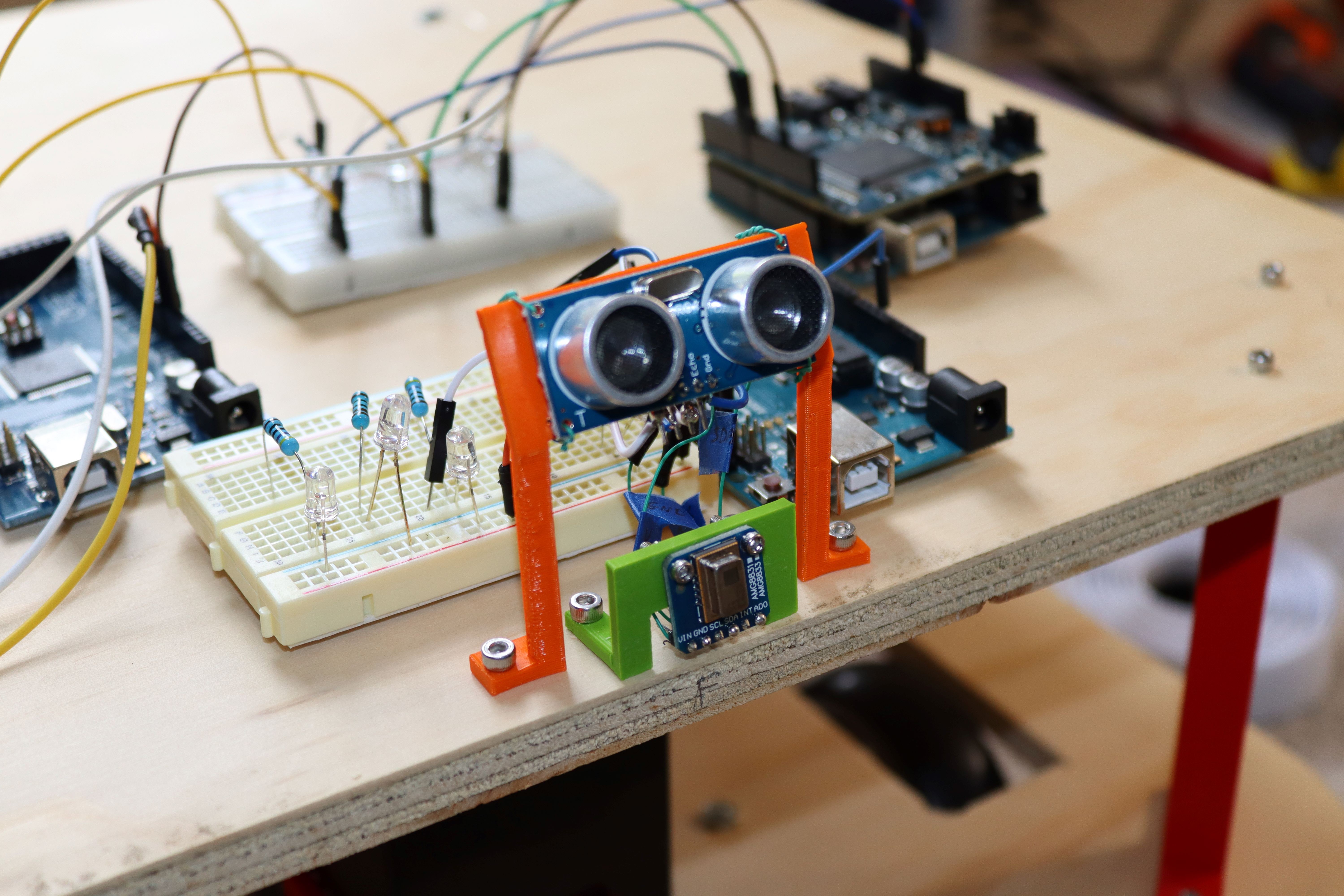
Wiring for the sensor assembly looks like this.


Changes to the Arduino Mega (master control) look like this.

Overall, the top of the bot is getting messy and will probably have to be cleaned up at some point.

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.