A lot happened last week and we didn't have time to update the project so everything is gonna happen in this log.
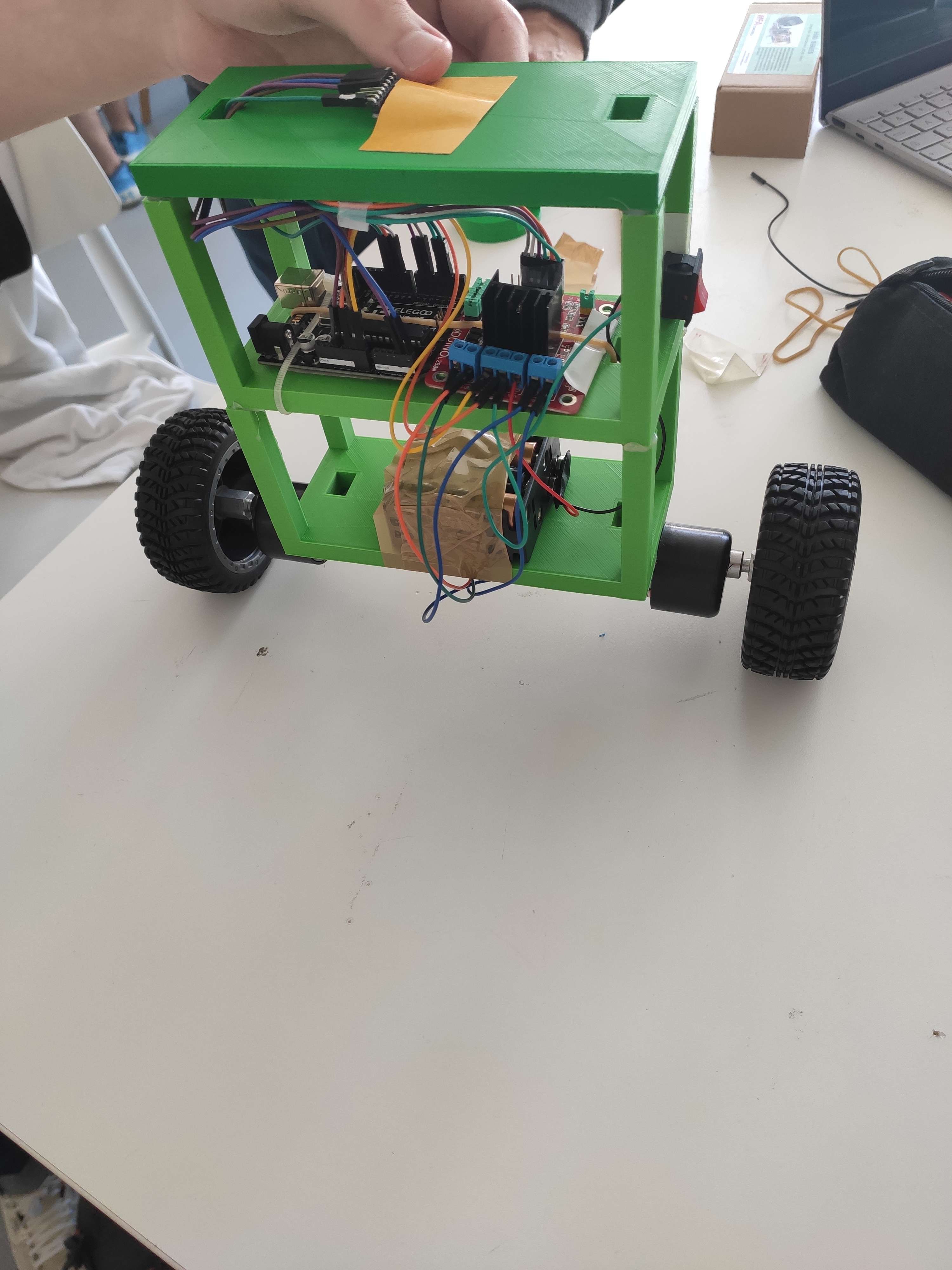
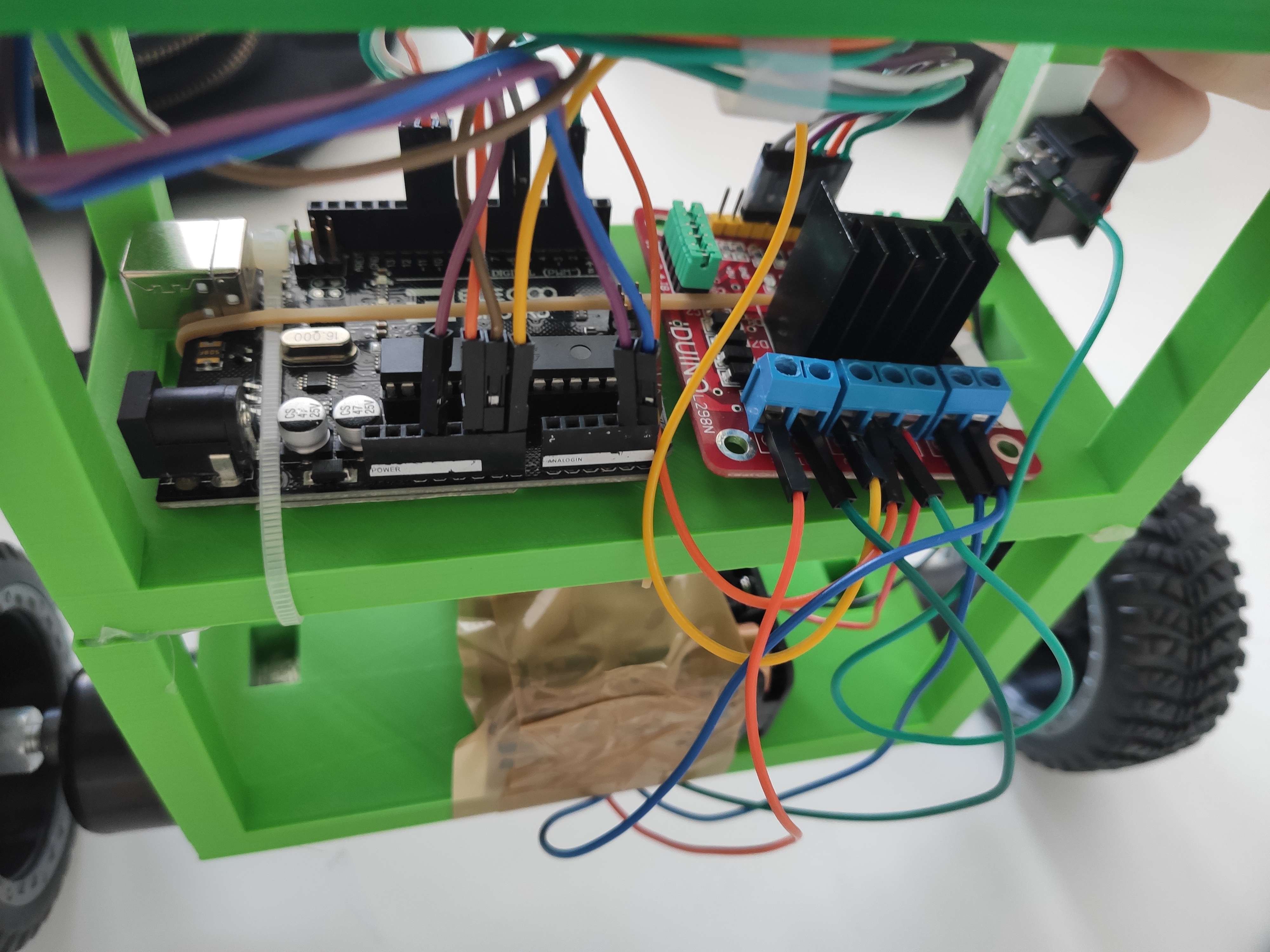
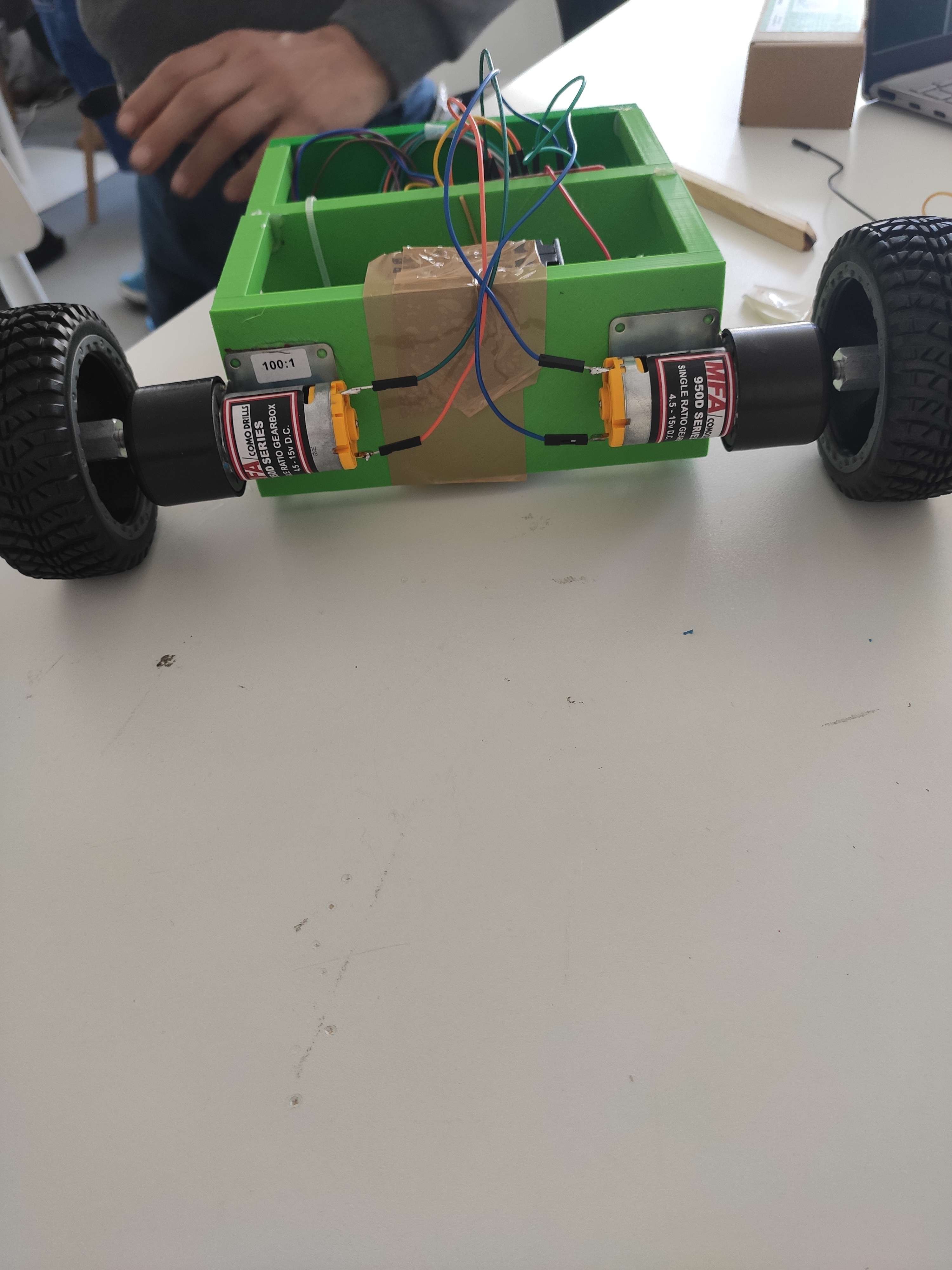
So first we got all the parts and started building the robot. We assembeled the body that we 3D printed (in green) with hot glue. Then we wired the arduino, the driver and the gyroscope that we put on the second and third 'floors' respectively. Then we attached the motors and the wheels together and glued them at the bottom. We soldered them to wires that went into the driver. (We wired them wrong at first so we had to do it again). Finally, we used a battery (12V) to power the driver that had a 5V output to the arduino card, with a switch we soldered to turn it on and off.
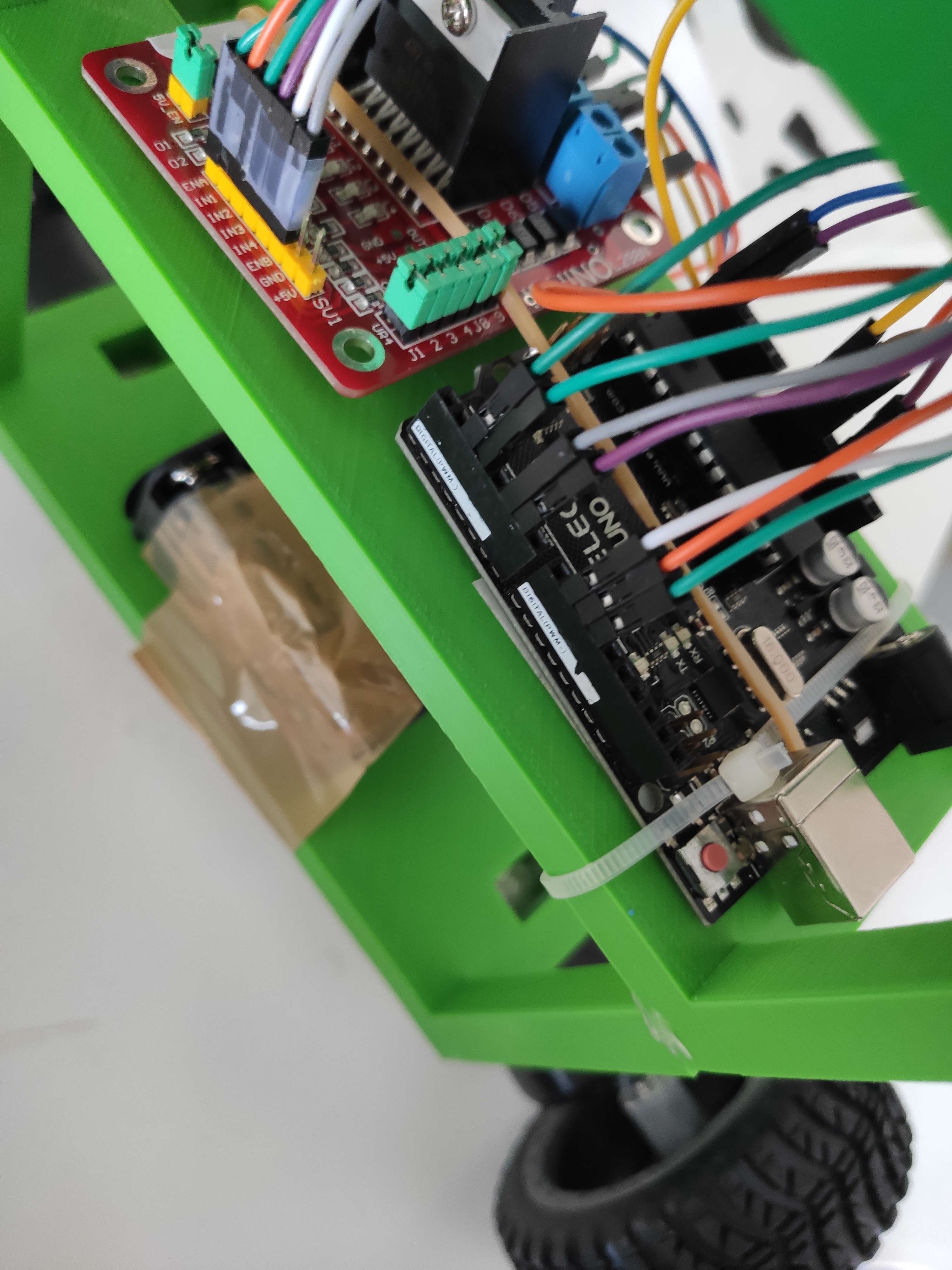
First problem we encountered was that, without the usb from the arduino to the computer, the robot wasn't powered properly and couldn't self balance. We added another 6V battery to the arduino and removed to 5V output from the driver, with a new switch. Then, after a lot of testing that went either really well or really bad, we noticed that the gyroscope wasn't oriented properly. Now the only thing left to do is test more values of the offest, kp etc to have it working perfectly.
More videos of it working (or not working) on the page
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.