0%
0%
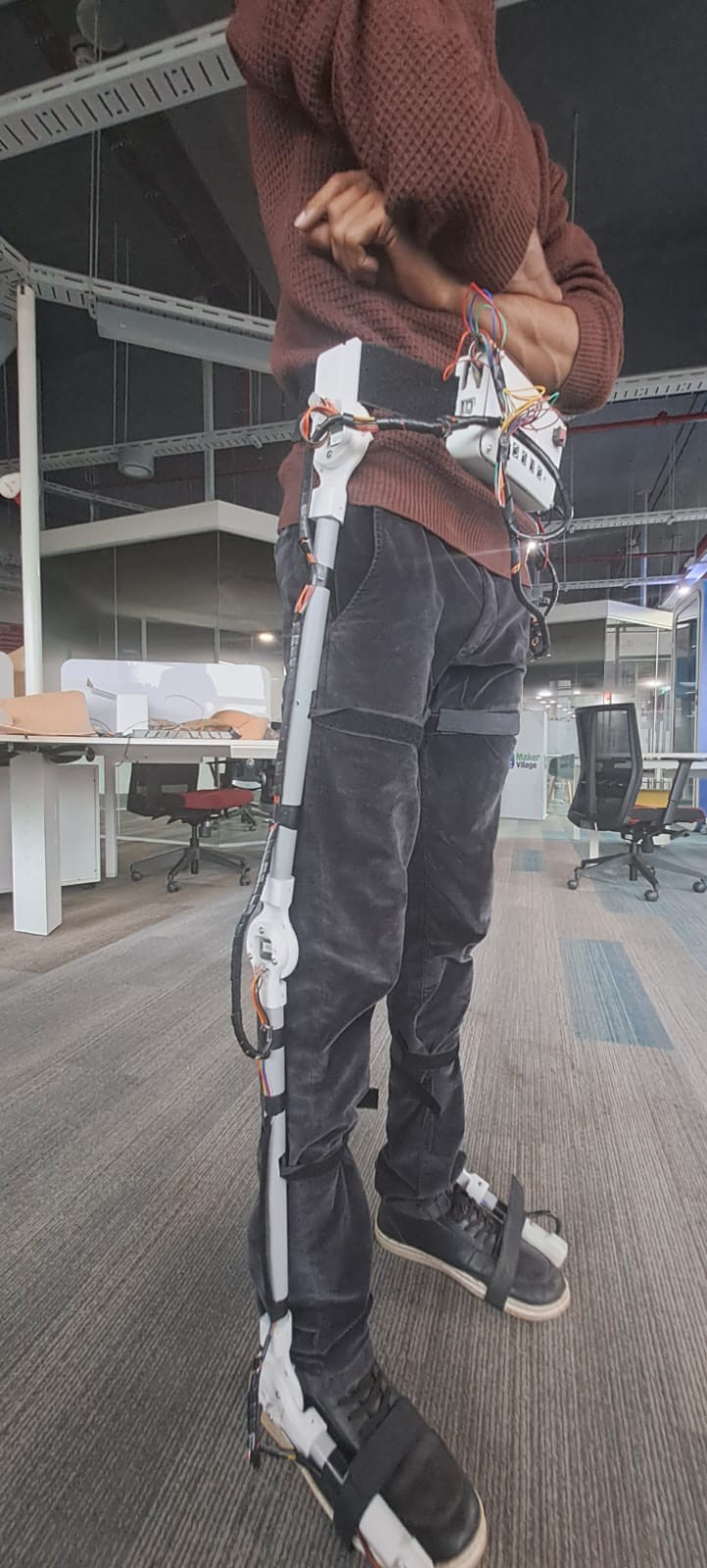
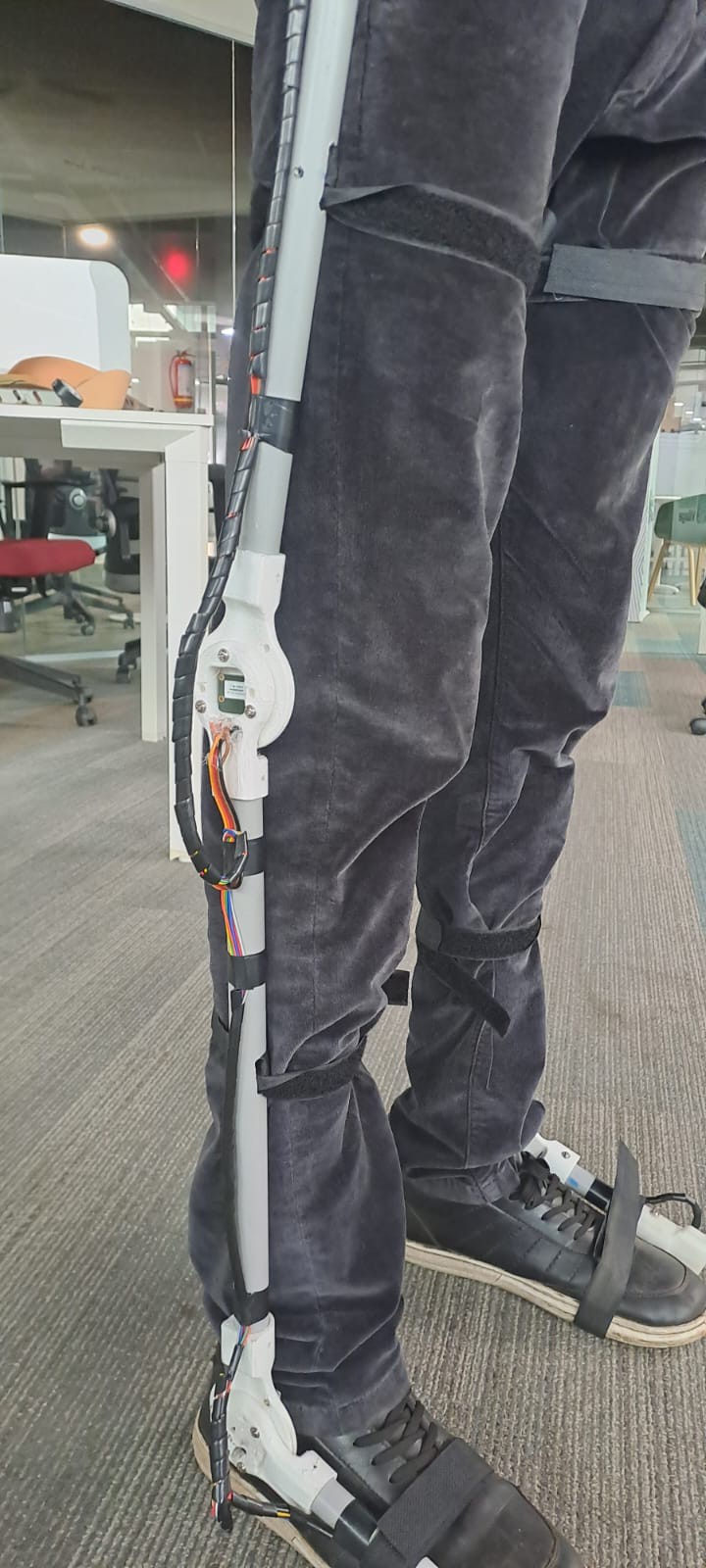
Intelligent Feedback System for Assistive Walking
This device addresses the lack of proper assistive and feedback devices for patients with lower limb disabilities around the globe.
 Robin Kanattu Thomas
Robin Kanattu ThomasBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests