 Niklas Frost
Niklas FrostMoving from virtual exploration to physical implementation, I embarked on creating a tangible prototype for my project. The primary components of this prototype included two 28BYJ-48 stepper motors, connected to the left and right back wheels, along with a front swivel wheel. These mechanisms were mounted on a sturdy piece of plywood, forming the base of the robot.
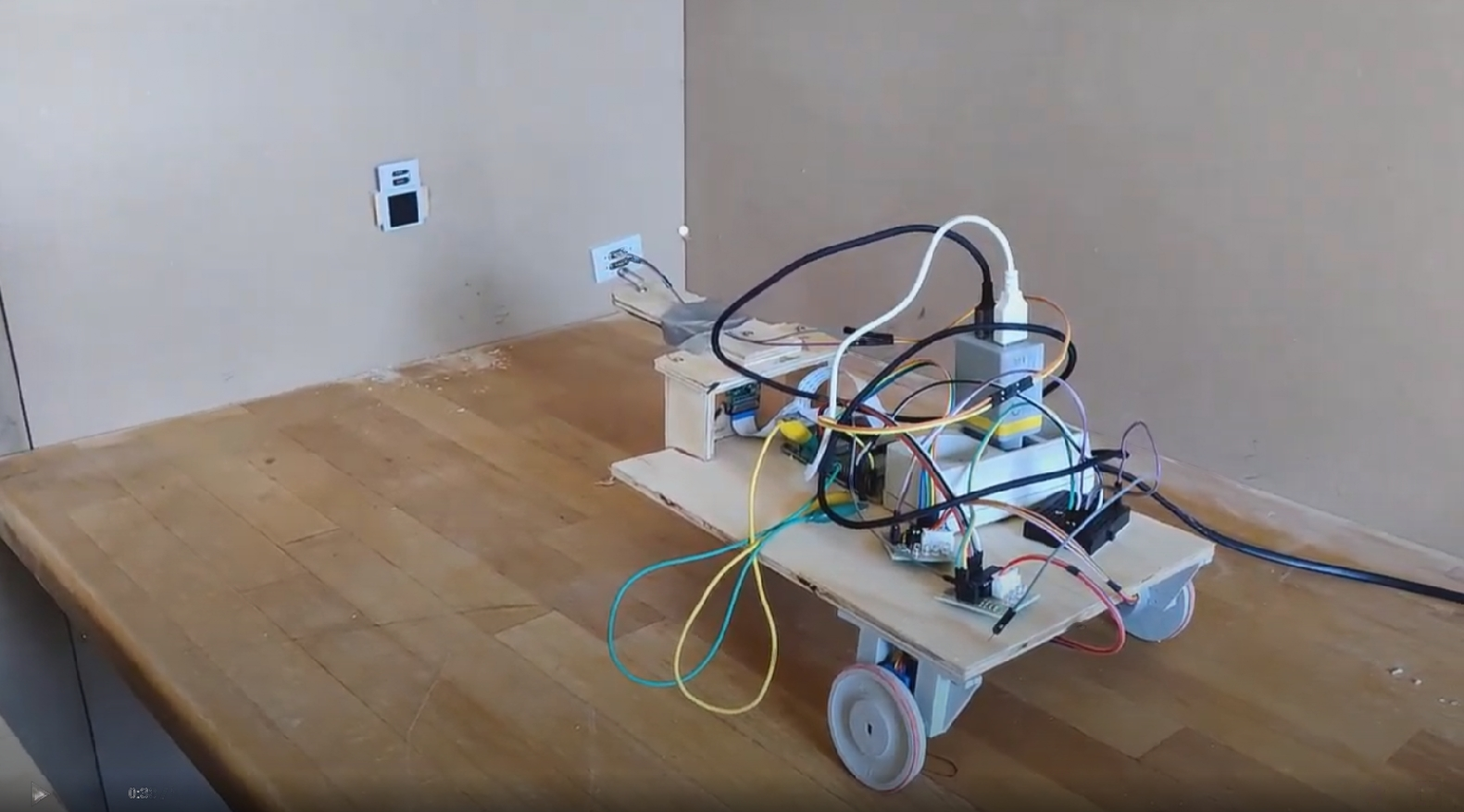
To control the robot's movements, I employed a Raspberry Pi 3 equipped with a camera. This setup allowed for real-time control and feedback during operation. Additionally, I attached the 3D printed version of the connector, which I had previously designed, to a wall. The robot was positioned in front of the connector, ready for testing and interaction.
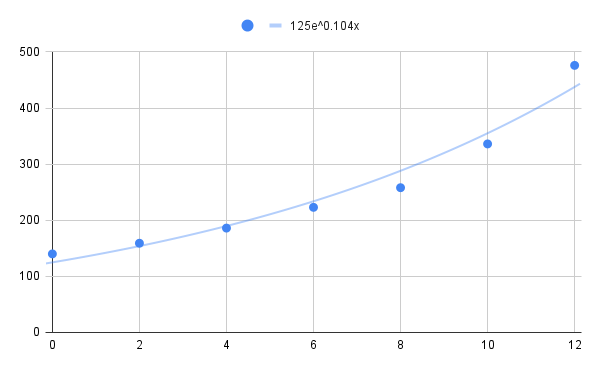
In order to assess the robot's ability to navigate towards the connector, I devised a systematic approach. First, I implemented a loop that instructed the robot to move forward by 2000 steps of the motor wheels. Simultaneously, the OpenCV code captured the size of the indicator within each iteration. This data was crucial for subsequent analysis.
Utilizing the collected information, I constructed a graph that allowed me to estimate the distance between the camera and the indicator in terms of motor steps. This quantitative estimation formed the basis for developing a mechanism that would autonomously guide the robot towards the indicator. By incorporating this feedback loop, the robot could continuously adapt its movements to reach the desired target.
To ensure accuracy and precision, I also incorporated a mechanism for aligning the robot with the indicator. By dynamically adjusting its orientation, the robot could position the indicator at the center of its field of view. This alignment step further improved the reliability and efficiency of the navigation process.
Combining these elements together, I achieved a significant milestone in my project. Through a successful trial, I witnessed the robot autonomously moving from an off-center position towards the connector. Additionally, I designed and implemented an alternative connector specifically for the robot, allowing it to establish a successful connection upon reaching the target.
The successful outcome of this initial prototype is a testament to the viability of my project's concept. It lays a strong foundation for further enhancements and refinements as I continue to explore and advance the capabilities of my autonomous robot.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.