 Revoxdyna
RevoxdynaThe hardware design is straightforward. The flappers will be installed on the motors and pressed on the user's arm gently and repeatedly to indicate the direction to move.
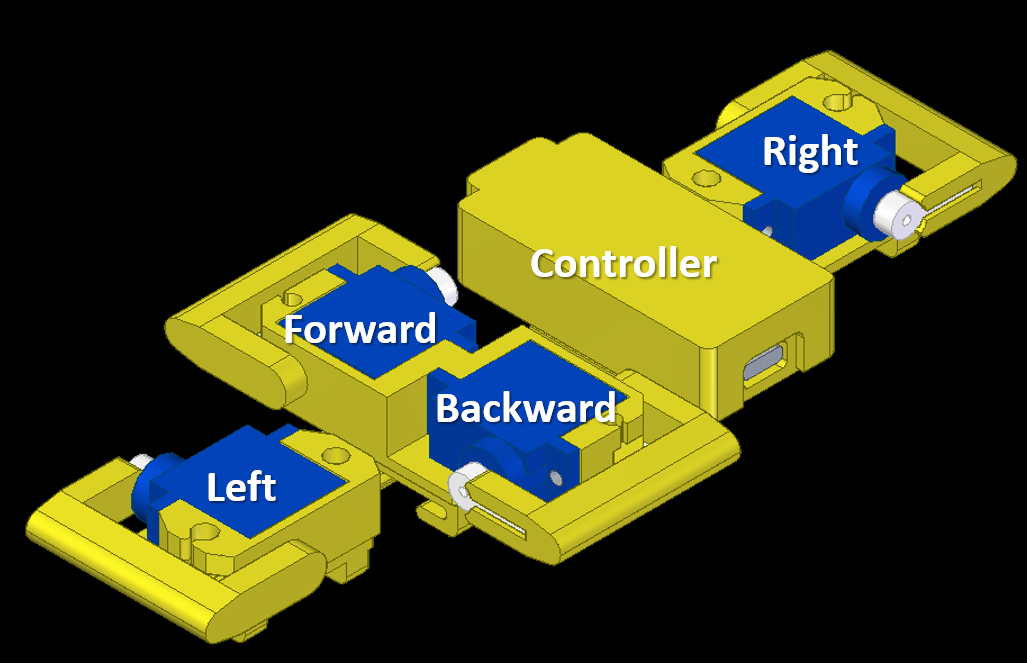
The device will be separated into the following modules:
- left flapper
- right flapper
- forward and backward flapper
- controller module
All the modules would be installed onto the elastic band eventually to make the device portable and easy to use.
As this is still the POC stage, the battery is not included and the wirings would be handled afterward.
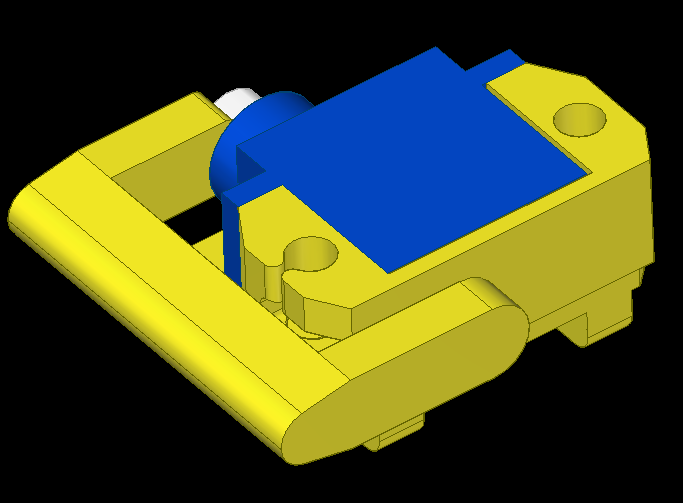
For the left/ right flapper module:
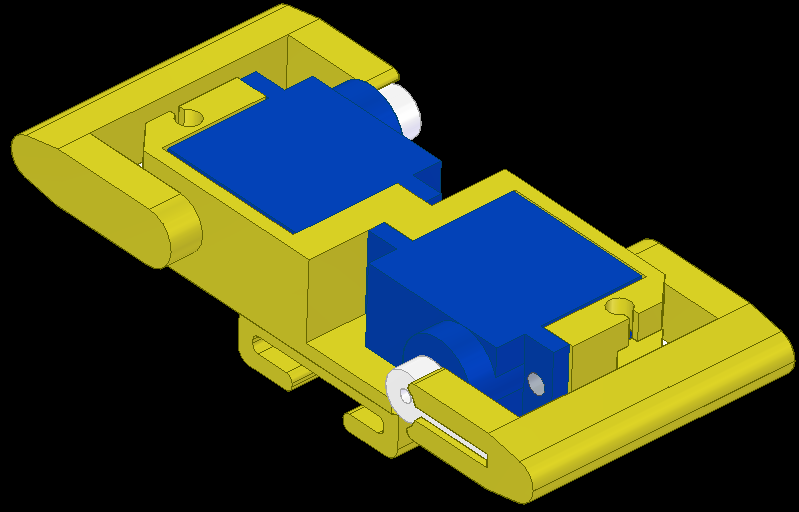
For the forward/ backward flapper module:
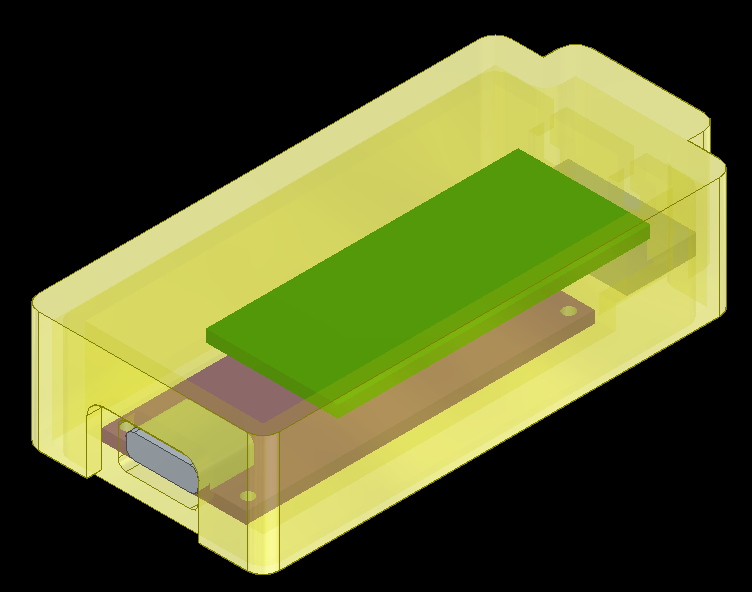
For the Arduino and Bluetooth module:
Overview:
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.