 YJ Kim
YJ KimThe overall system of ROV that I am envisioning is as follows. In ROV operation, the main board plays the most central role. I'm currently determining the specifications, and they are almost decided.
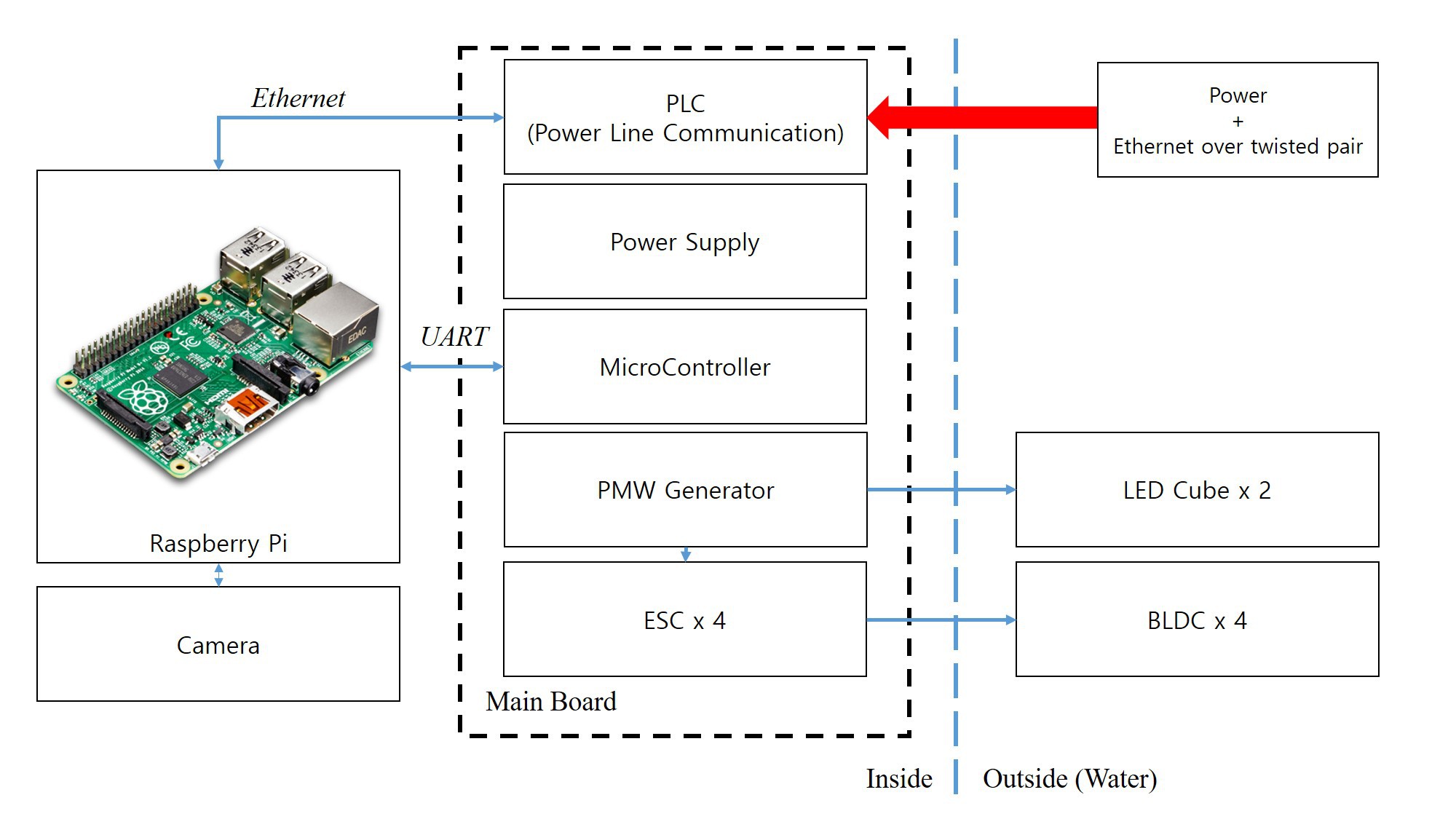
- PLC(Power line communication)
Since ROV is a robot that operates in water, it can only be connected to the ground controller by wire. In order for ground users to communicate with the Raspberry pi inside the ROV, there must be an ethernet connection each other. However, in that case, up to 8 strands of wire should be needed. As the number of lines increases, it directly affects the ROV movement, and the system becomes bigger and the cost increases. So I decided to use PLC(Power Line Communication) for reduce the number of wires. In this case, we only need two pair of wire between rov and ground controller.
There are two PLC modules that we can obtain. First, OpenROV uses a board inside the home PLC module called 'tenda p200'. Second, there is a Fathom-X module used by BlueRobotics. In terms of performance, BlueRobotics' Fathom-X seems to be better, but considering the pricing and ease of purchase, I think it's better to use the Tenda P200 liek OpenROV.
- ESC
 I'm currently designing the main board PCB, and it may be completed next week. :)
I'm currently designing the main board PCB, and it may be completed next week. :)
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.