 Petar Crnjak
Petar CrnjakFAZE4

As some of you may know I also designed 2 other 3D-printed DIY robot arms; Faze4 and CM6. I would say Faze4 did well in the open-source community and has an active user base. It is mostly used by students as thesis work and just like a DIY robot project. The big mistake I did on the part of Faze4 was that its software and electronics were underdeveloped. It was mostly used as mechanical construction that people used with their own software and electronics. That drove a lot of people away from the project since they wanted a complete solution.
CM6
CM6 is a compliant robot arm that is much more complex in terms of control and electronics. It uses BLDC gimbal motors paired with custom-made BLDC drivers called S-drives. CM6 compared to Faze4 was technologically much more complex and I contribute that to its moderate success. The drives I designed were hard to make and were hit hard by covid and chip shortage. People that wanted to build it could not and to be honest there was I lot of work that needed to be done on the software and control side that I just did not know how to do at that time. Driver electronics were also quite basic. At the time I believed I did everything right and that S-drives were something special but I was way too wrong. Since then I worked in startups designing inverters and electronics for electric vehicles like cars, bikes, and delivery vehicles. And only now I can say that I could design industry-level electronics and control algorithms for something like CM6.
PAROL6

Now we come to PAROL6. Best of both worlds. Mechanical elegance of Faze4 and control and electronics inspired by CM6. PAROL6 was created to be a new standard for open-source robotic arms. But it was also designed with the goal to revive Faze4 and CM6. It was also designed to assist any robot arm builder by providing a electronics and control software/GUI/API stack they can build their mechanical structure on top of.
PAROL6 and FAZE4 integration
PAROL6 electronics and software will be really easy to integrate into Faze4 since both are open-loop stepper-controlled robot arms with limit switches. What this means is that ANY open loop 6 axes stepper robot will be able to use PAROL6 electronics and software platform to develop.
PAROL6 and CM6 integration
PAROL6 uses open-loop steppers. The trinamic stepper drivers are in the base of the robot and are responsible for the movement of the joints. This works really well but robots need to be a closed-loop for much better performance and safety. PAROL6 was made with that in mind and can be easily upgraded with closed-loop stepper drivers that are being developed.
By doing that robot becomes closer to CM6 and guess what, new drivers for CM6 are also being developed. They would be able to daisy chain and reduce wiring, have current sensing for torque control, 14-bit magnetic encoders, safety features, and much more.
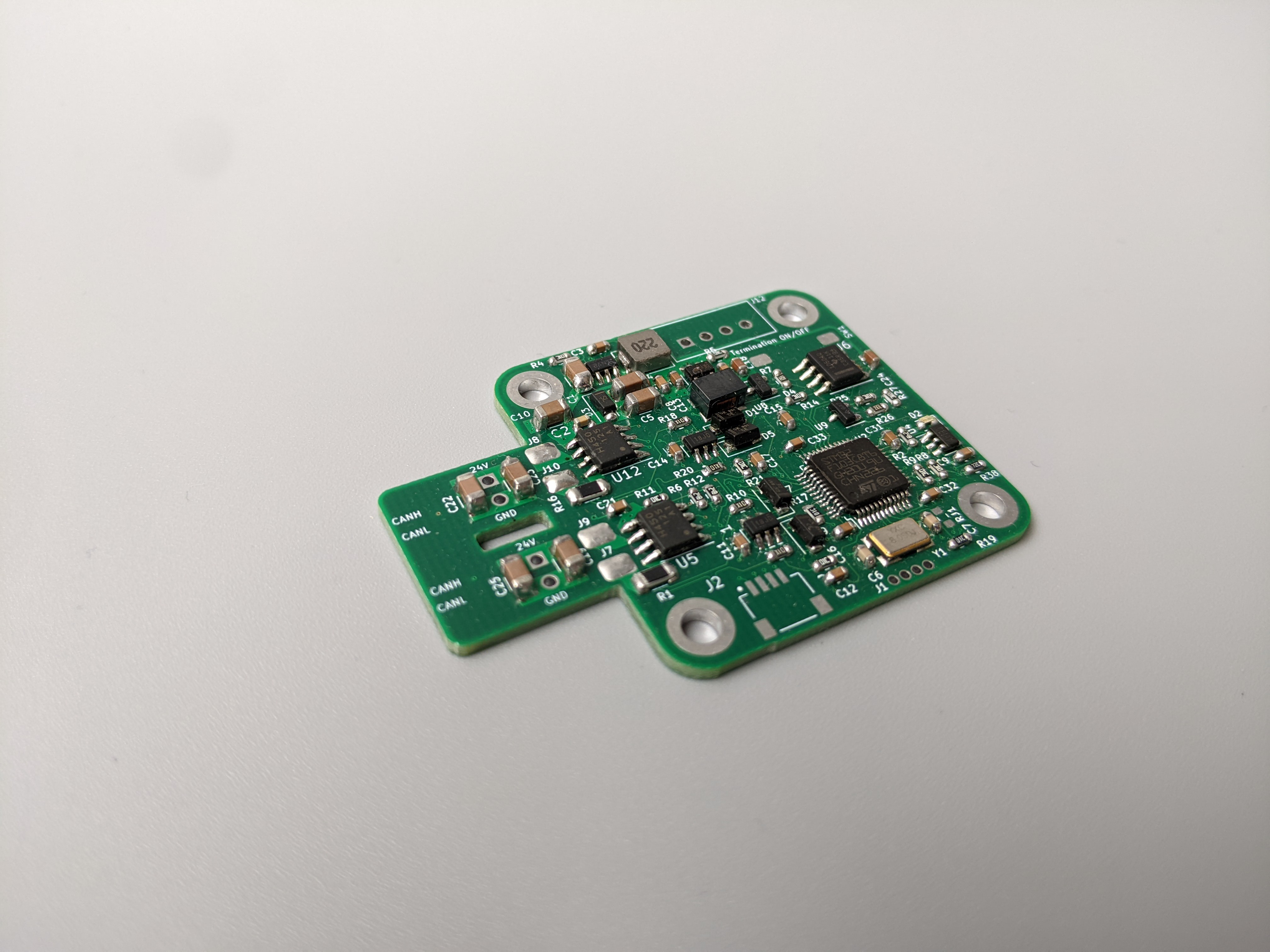
Image of stepper driver for PAROL6. It is a small 39mm x 39mm board that fits on top of the NEMA 17 stepper module. The driver can run the FOC algorithm on stepper motors.
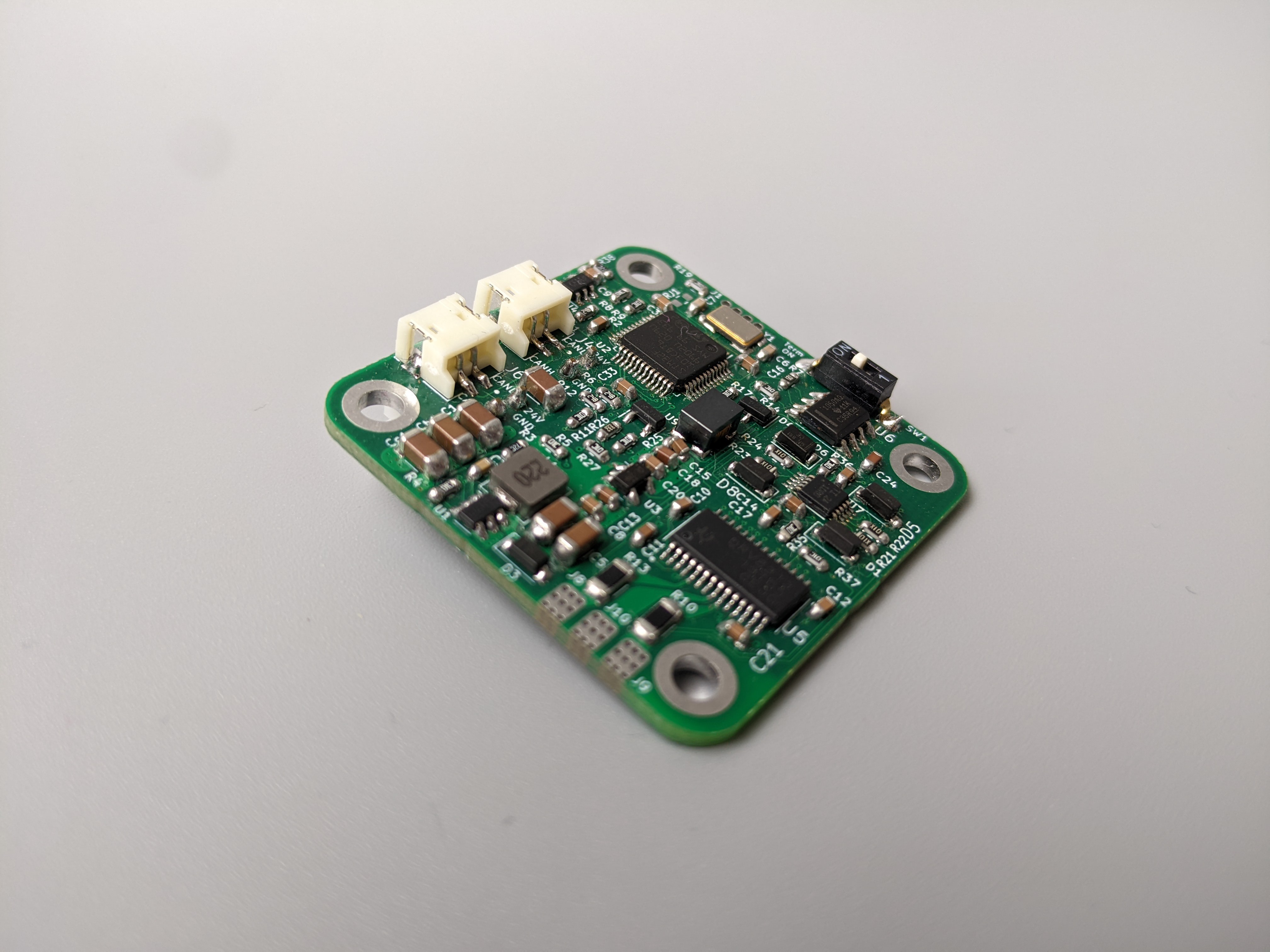
This is a driver for small BLDC gimbal motors. It is by design really similar to the stepper driver for PAROL6 except it is designed for 3-phase gimbal motors. It is perfect for CM6 robotic arm and expect to see a post about the new and upgraded CM6 soon!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.