 Aaed Musa
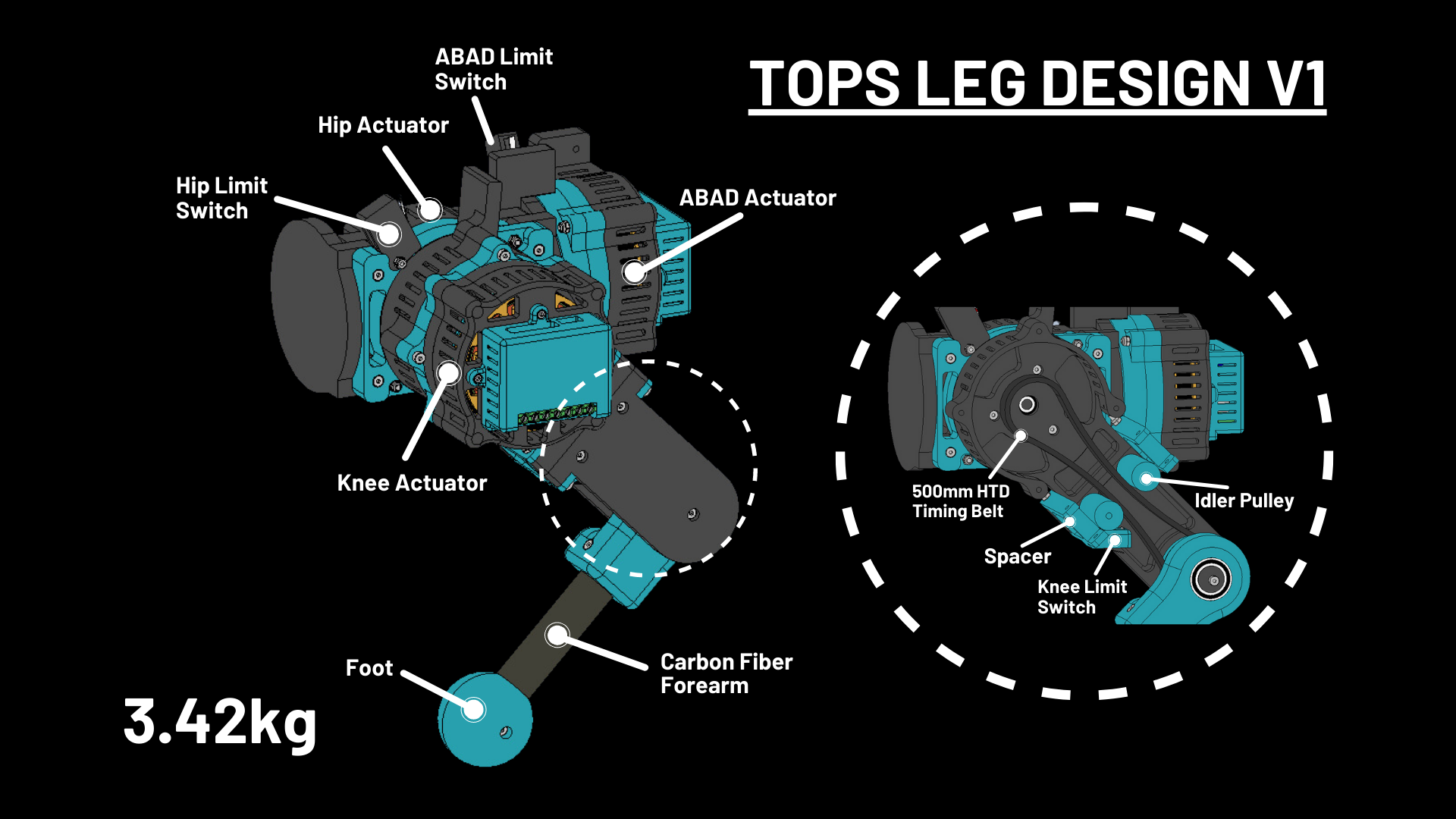
Aaed Musa- 3-DOF/ 3 Joints/ 3 Actuators (abad, hip, and knee)
- Each actuator has a 9:1 planetary gear set reduction
- Each actuator is a modified version of my OpenQDD Actuator.
- The leg design is integrated into the design of each actuator.
- The knee actuator uses a belt-pulley system with a 1:1 gear reduction
- Derived my own inverse kinematic equations called QIK (Quadruped Inverse Kinematics) to calculate the joint angular positions when placing the foot at a specific point in space.
- Made an Arduino Library for the QIK equations.
- Sinusoidal gate trajectory
- Weight: 3.42kg

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
This is so cool, thank you for sharing! My partner and I are making use of your project for our own learning, but I noticed the arduino library link is broken- is there a way for us to see this elsewhere?
-Jami
Are you sure? yes | no