 Guillermo Perez Guillen
Guillermo Perez GuillenBelow you have the code uploaded to the 3D Magnetic Sensor 2Go board: magnetic_sensor.ino
// AUTHOR: GUILLERMO PEREZ GUILLEN
#include <Tle493d.h>
Tle493d Tle493dMagnetic3DSensor = Tle493d();
void setup() {
Serial.begin(9600);
pinMode (3,OUTPUT);
pinMode (14,OUTPUT);
digitalWrite (3,LOW);
digitalWrite (14,HIGH);
while (!Serial);
//If using the MS2Go-Kit: Enable following lines to switch on the sensor
// ***
pinMode(LED2, OUTPUT);
digitalWrite(LED2, HIGH);
delay(50);
// ***
Tle493dMagnetic3DSensor.begin();
}
void loop() {
Tle493dMagnetic3DSensor.updateData();
Serial.print(Tle493dMagnetic3DSensor.getAzimuth());
Serial.print("\t");
if(Tle493dMagnetic3DSensor.getAzimuth()>0) {
digitalWrite (3,LOW);
digitalWrite (14,HIGH);
Serial.println(Tle493dMagnetic3DSensor.getPolar());
}
else {
Serial.println(-Tle493dMagnetic3DSensor.getPolar());
digitalWrite (3,HIGH);
digitalWrite (14,LOW);
delay(1000);
digitalWrite (3,LOW);
digitalWrite (14,HIGH);
}
}
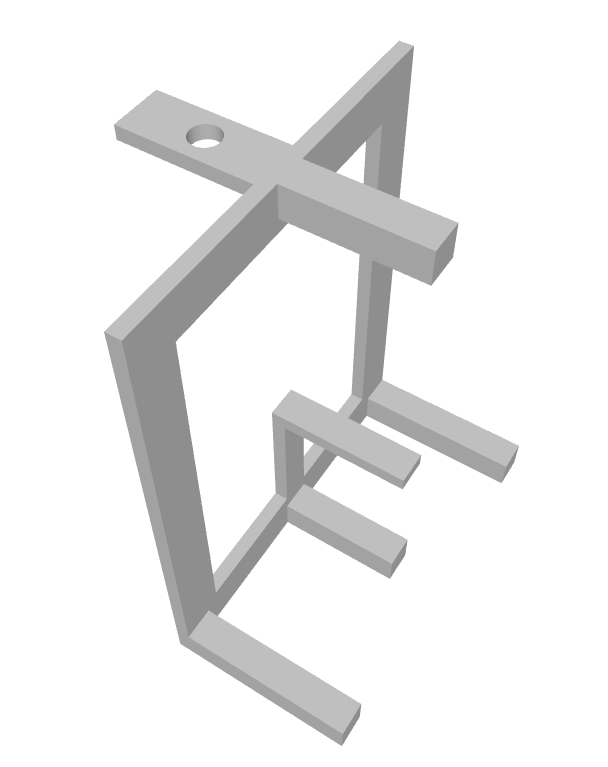
Below is an image of how to mount the 3D Magnetic Sensor 2Go board:

Here I show you the design of the 3D mechanism that you can get in the download section (mechanism. STL).
How does it works?
- The magnetic sensor knob can turn and it gives me the Azimuth in radians, to its left it gives positive values and to its right negative values;
- I have attached a plastic strip to the magnetic sensor knob to move it every time the rubber ball hit it or the servo returns it to the to the starting position;
- When a rubber ball hits the plastic strip, the magnetic sensor knob turns and goes into the area of negative radian values;
- Then we activate a pulse through pin 3, and this activates the relay. Finally, this relay activates the user button of the PSoC 62S2 WiFi BT Pioneer board;
- The PSoC 62S2 WiFi BT Pioneer board performs two functions: 1) activate servo 7 to returns the magnetic sensor knob into the area of positive radian values, and 2) the robot arm takes the rubber ball and places it in the container;
- The cycle repeats until there're no more rubber balls; and
- This system can be used to detect, count, and sorter objects.

Below I show you the code uploaded to the PSoC 62S2 WiFi BT Pioneer board: sorting_objects.c
// AUTHOR: GUILLERMO PEREZ GUILLEN
#include "cy_pdl.h"
#include "cy_retarget_io.h"
#include "cyhal.h"
#include "cybsp.h"
/******************************************************************************
* Macros
*****************************************************************************/
#define DELAY_SHORT_MS (250) /* milliseconds */
#define DELAY_LONG_MS (300) /* milliseconds */
#define LED_BLINK_COUNT (4)
#define GPIO_INTERRUPT_PRIORITY (7u)
/* PWM Frequency */
#define PWM_FREQUENCY (50u)
/* PWM Duty-cycle */
#define PWM_DUTY_CYCLE_1 (4.58f) // 30 degrees
#define PWM_DUTY_CYCLE_2 (7.75f) // 90 degrees
#define PWM_DUTY_CYCLE_3 (12.50f) // 180 degrees
#define PWM_DUTY_CYCLE_4 (10.92f) // 150 degrees
#define PWM_DUTY_CYCLE_5 (7.75f) // 90 degrees
#define PWM_DUTY_CYCLE_6 (4.50f) // 30 degrees
#define PWM_DUTY_CYCLE_7 (12.50f) // 30 degrees
/*******************************************************************************
* Function Prototypes
********************************************************************************/
static void gpio_interrupt_handler(void *handler_arg, cyhal_gpio_event_t event);
/*******************************************************************************
* Global Variables
********************************************************************************/
volatile bool gpio_intr_flag = false;
/*******************************************************************************
* Function Name: main
*******************************************************************************/
int main(void)
{
cy_rslt_t result;
uint32_t count = 0;
uint32_t delay_led_blink = DELAY_LONG_MS;
/* PWM object */
cyhal_pwm_t servo_1, servo_2, servo_3, servo_4, servo_5, servo_6, servo_7;
/* Initialize the device and board peripherals */
result = cybsp_init();
/* Board init failed. Stop program execution */
if (result != CY_RSLT_SUCCESS)
{
CY_ASSERT(0);
}
/* Initialize retarget-io to use the debug UART port */
result = cy_retarget_io_init(CYBSP_DEBUG_UART_TX, CYBSP_DEBUG_UART_RX,
CY_RETARGET_IO_BAUDRATE);
/* Initialize the user LED */
result = cyhal_gpio_init(CYBSP_USER_LED, CYHAL_GPIO_DIR_OUTPUT,
CYHAL_GPIO_DRIVE_STRONG, CYBSP_LED_STATE_OFF);
/* Initialize the user button */
result = cyhal_gpio_init(CYBSP_USER_BTN, CYHAL_GPIO_DIR_INPUT,
CYHAL_GPIO_DRIVE_PULLUP, CYBSP_BTN_OFF);
/* Configure GPIO interrupt */
cyhal_gpio_register_callback(CYBSP_USER_BTN,
gpio_interrupt_handler, NULL);
cyhal_gpio_enable_event(CYBSP_USER_BTN, CYHAL_GPIO_IRQ_FALL,
GPIO_INTERRUPT_PRIORITY, true);
/* Enable global interrupts */
__enable_irq();
/* Set the PWM output frequency and duty cycle */
result = cyhal_pwm_set_duty_cycle(&servo_1, PWM_DUTY_CYCLE_1, PWM_FREQUENCY);
result = cyhal_pwm_set_duty_cycle(&servo_2, PWM_DUTY_CYCLE_2, PWM_FREQUENCY);
result = cyhal_pwm_set_duty_cycle(&servo_3, PWM_DUTY_CYCLE_3, PWM_FREQUENCY);
result = cyhal_pwm_set_duty_cycle(&servo_4, PWM_DUTY_CYCLE_4, PWM_FREQUENCY);
result = cyhal_pwm_set_duty_cycle(&servo_5, PWM_DUTY_CYCLE_5, PWM_FREQUENCY);
result = cyhal_pwm_set_duty_cycle(&servo_6, PWM_DUTY_CYCLE_6, PWM_FREQUENCY);
result = cyhal_pwm_set_duty_cycle(&servo_7, PWM_DUTY_CYCLE_7, PWM_FREQUENCY);
/* \x1b[2J\x1b[;H - ANSI ESC sequence for clear screen */
printf("\x1b[2J\x1b[;H");
printf("**************** PSoC 6 MCU: GPIO Interrupt *****************\r\n");
for (;;)
{
/* Start the PWM */
result = cyhal_pwm_start(&servo_1);
cyhal_system_delay_ms(10);
result = cyhal_pwm_start(&servo_2);
cyhal_system_delay_ms(10);
result = cyhal_pwm_start(&servo_3);
cyhal_system_delay_ms(10);
result = cyhal_pwm_start(&servo_4);
cyhal_system_delay_ms(10);
result = cyhal_pwm_start(&servo_5);
cyhal_system_delay_ms(10);
result = cyhal_pwm_start(&servo_6);
cyhal_system_delay_ms(10);
result = cyhal_pwm_start(&servo_7);
cyhal_system_delay_ms(10);
/* Check the interrupt status */
if (true == gpio_intr_flag)
{
gpio_intr_flag = false;
/* Update LED toggle delay */
if (DELAY_LONG_MS == delay_led_blink)
{
delay_led_blink = DELAY_SHORT_MS;
}
else
{
delay_led_blink = DELAY_LONG_MS;
}
}
/* Blink LED four times */
for (count = 0; count < LED_BLINK_COUNT; count++)
{
cyhal_gpio_write(CYBSP_USER_LED, CYBSP_LED_STATE_ON);
cyhal_system_delay_ms(delay_led_blink);
cyhal_gpio_write(CYBSP_USER_LED, CYBSP_LED_STATE_OFF);
cyhal_system_delay_ms(delay_led_blink);
}
cyhal_system_delay_ms(10);
for (int i = 180; i >= 0; i--){ // servo_7
float PWM_DUTY_CYCLE_G = ((i*9.5)/180)+3;
result = cyhal_pwm_set_duty_cycle(&servo_7, PWM_DUTY_CYCLE_G, PWM_FREQUENCY);
result = cyhal_pwm_start(&servo_7);
cyhal_system_delay_ms(20);
}
cyhal_system_delay_ms(100);
for (int i = 0; i <= 190; i++){ // servo_7
float PWM_DUTY_CYCLE_G = ((i*9.5)/180)+3;
result = cyhal_pwm_set_duty_cycle(&servo_7, PWM_DUTY_CYCLE_G, PWM_FREQUENCY);
result = cyhal_pwm_start(&servo_7);
cyhal_system_delay_ms(20);
}
cyhal_system_delay_ms(100);
for (int i = 180; i >= 90; i--){ // servo_3
float PWM_DUTY_CYCLE_C = ((i*9.5)/180)+3;
result = cyhal_pwm_set_duty_cycle(&servo_3, PWM_DUTY_CYCLE_C, PWM_FREQUENCY);
result = cyhal_pwm_start(&servo_3);
cyhal_system_delay_ms(20);
}
cyhal_system_delay_ms(100);
for (int i = 90; i <= 120; i++){ // servo_3
float PWM_DUTY_CYCLE_C = ((i*9.5)/180)+3;
result = cyhal_pwm_set_duty_cycle(&servo_3, PWM_DUTY_CYCLE_C, PWM_FREQUENCY);
result = cyhal_pwm_start(&servo_3);
cyhal_system_delay_ms(20);
}
cyhal_system_delay_ms(100);
for (int i = 110; i >= 60; i--){ // servo_6
float PWM_DUTY_CYCLE_F = ((i*9.5)/180)+3;
result = cyhal_pwm_set_duty_cycle(&servo_6, PWM_DUTY_CYCLE_F, PWM_FREQUENCY);
result = cyhal_pwm_start(&servo_6);
cyhal_system_delay_ms(20);
}
cyhal_system_delay_ms(100);
for (int i = 150; i >= 90; i--){ // servo_4
float PWM_DUTY_CYCLE_D = ((i*9.5)/180)+3;
result = cyhal_pwm_set_duty_cycle(&servo_4, PWM_DUTY_CYCLE_D, PWM_FREQUENCY);
result = cyhal_pwm_start(&servo_4);
cyhal_system_delay_ms(20);
}
cyhal_system_delay_ms(100);
for (int i = 180; i >= 90; i--){ // servo_1 ***
float PWM_DUTY_CYCLE_A = ((i*9.5)/180)+3;
result = cyhal_pwm_set_duty_cycle(&servo_1, PWM_DUTY_CYCLE_A, PWM_FREQUENCY);
result = cyhal_pwm_start(&servo_1);
cyhal_system_delay_ms(20);
}
cyhal_system_delay_ms(100);
for (int i = 90; i <= 120; i++){ // servo_4
float PWM_DUTY_CYCLE_D = ((i*9.5)/180)+3;
result = cyhal_pwm_set_duty_cycle(&servo_4, PWM_DUTY_CYCLE_D, PWM_FREQUENCY);
result = cyhal_pwm_start(&servo_4);
cyhal_system_delay_ms(20);
}
cyhal_system_delay_ms(100);
for (int i = 60; i <= 110; i++){ // servo_6
float PWM_DUTY_CYCLE_F = ((i*9.5)/180)+3;
result = cyhal_pwm_set_duty_cycle(&servo_6, PWM_DUTY_CYCLE_F, PWM_FREQUENCY);
result = cyhal_pwm_start(&servo_6);
cyhal_system_delay_ms(20);
}
cyhal_system_delay_ms(100);
for (int i = 90; i >= 60; i--){ // servo_1 ***
float PWM_DUTY_CYCLE_A = ((i*9.5)/180)+3;
result = cyhal_pwm_set_duty_cycle(&servo_1, PWM_DUTY_CYCLE_A, PWM_FREQUENCY);
result = cyhal_pwm_start(&servo_1);
cyhal_system_delay_ms(20);
}
cyhal_system_delay_ms(100);
for (int i = 120; i <= 150; i++){ // servo_4
float PWM_DUTY_CYCLE_D = ((i*9.5)/180)+3;
result = cyhal_pwm_set_duty_cycle(&servo_4, PWM_DUTY_CYCLE_D, PWM_FREQUENCY);
result = cyhal_pwm_start(&servo_4);
cyhal_system_delay_ms(20);
}
cyhal_system_delay_ms(100);
for (int i = 120; i >= 90; i--){ // servo_3
float PWM_DUTY_CYCLE_C = ((i*9.5)/180)+3;
result = cyhal_pwm_set_duty_cycle(&servo_3, PWM_DUTY_CYCLE_C, PWM_FREQUENCY);
result = cyhal_pwm_start(&servo_3);
cyhal_system_delay_ms(20);
}
cyhal_system_delay_ms(100);
for (int i = 75; i <= 90; i++){ // servo_2
float PWM_DUTY_CYCLE_B = ((i*9.5)/180)+3;
result = cyhal_pwm_set_duty_cycle(&servo_2, PWM_DUTY_CYCLE_B, PWM_FREQUENCY);
result = cyhal_pwm_start(&servo_2);
cyhal_system_delay_ms(20);
}
cyhal_system_delay_ms(100);
for (int i = 110; i >= 30; i--){ // servo_6
float PWM_DUTY_CYCLE_F = ((i*9.5)/180)+3;
result = cyhal_pwm_set_duty_cycle(&servo_6, PWM_DUTY_CYCLE_F, PWM_FREQUENCY);
result = cyhal_pwm_start(&servo_6);
cyhal_system_delay_ms(20);
}
cyhal_system_delay_ms(100);
for (int i = 60; i >= 30; i--){ // servo_1 ***
float PWM_DUTY_CYCLE_A = ((i*9.5)/180)+3;
result = cyhal_pwm_set_duty_cycle(&servo_1, PWM_DUTY_CYCLE_A, PWM_FREQUENCY);
result = cyhal_pwm_start(&servo_1);
cyhal_system_delay_ms(20);
}
cyhal_system_delay_ms(100);
for (int i = 90; i <= 180; i++){ // servo_3
float PWM_DUTY_CYCLE_C = ((i*9.5)/180)+3;
result = cyhal_pwm_set_duty_cycle(&servo_3, PWM_DUTY_CYCLE_C, PWM_FREQUENCY);
result = cyhal_pwm_start(&servo_3);
cyhal_system_delay_ms(20);
}
cyhal_system_delay_ms(10);
result = cyhal_pwm_stop(&servo_1);
result = cyhal_pwm_stop(&servo_2);
result = cyhal_pwm_stop(&servo_3);
result = cyhal_pwm_stop(&servo_4);
result = cyhal_pwm_stop(&servo_5);
result = cyhal_pwm_stop(&servo_6);
result = cyhal_pwm_stop(&servo_7);
cyhal_system_delay_ms(10);
/* Enter deep sleep mode */
cyhal_system_deepsleep();
}
}
/*******************************************************************************
* Function Name: gpio_interrupt_handler
*******************************************************************************/
static void gpio_interrupt_handler(void *handler_arg, cyhal_gpio_irq_event_t event)
{
gpio_intr_flag = true;
}
In the video below I show you a test with the 3D Magnetic Sensor 2Go TLE493D, the robot arm, and the PSoC 62S2 WiFi BT Pioneer Board.
Conclusión:
- In a creative way, here I have used the 3D Magnetic Sensor 2Go TLE493D to detect the rubber balls and warn the PSoC 6 WiFi-BT Pioneer Kit board that it has to activate the robot arm to take the ball and place it in a container. The robot arm goes into low energy mode once this task is finished.
- In addition, a servo is activated to return the magnetic sensor to its original position.
- My idea is to demonstrate the possibility of helping to classify objects if we combine this prototype with the two versions previously shown in this project: the Arduino version, and the first version of Infineon.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.