 Tobias
TobiasWhen modelling the latch in OpenSCAD I included the kinematic model - essentially the movement of the latch is a parameter, and all parts move as if they were bolted together and to the appropriate pivot points. Why include this? The most vain reason is that it allowed me to see how the latch worked in motion - and to see if this was something that was interesting enough to spend the time and effort on. A side effect of this was creating some of the animated images you can see in other posts. A more practical reason is that it allowed me to test the model for interference - any point in the motion where one part wants to be in the same place as another part - obviously this would cause a problem.
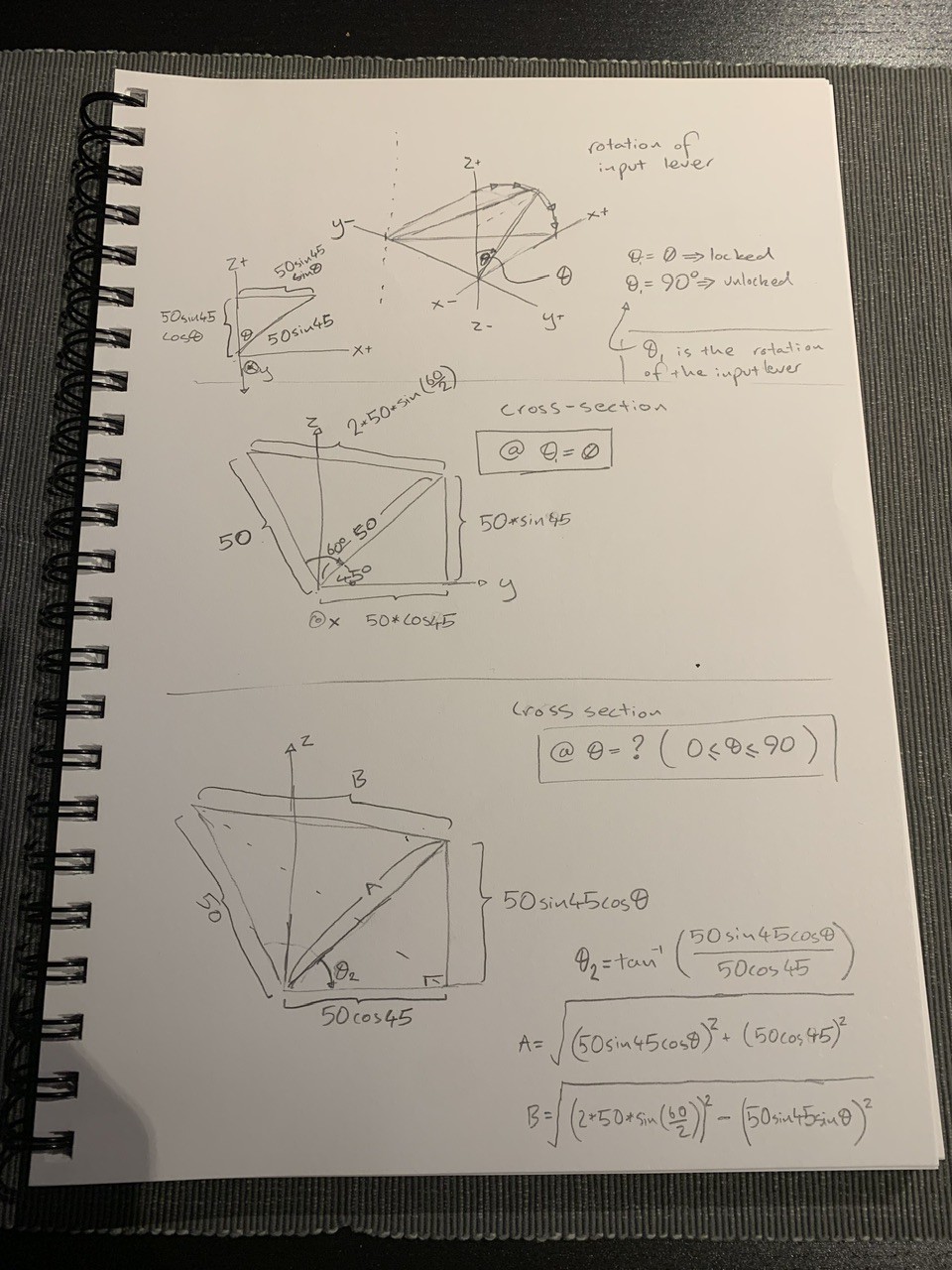
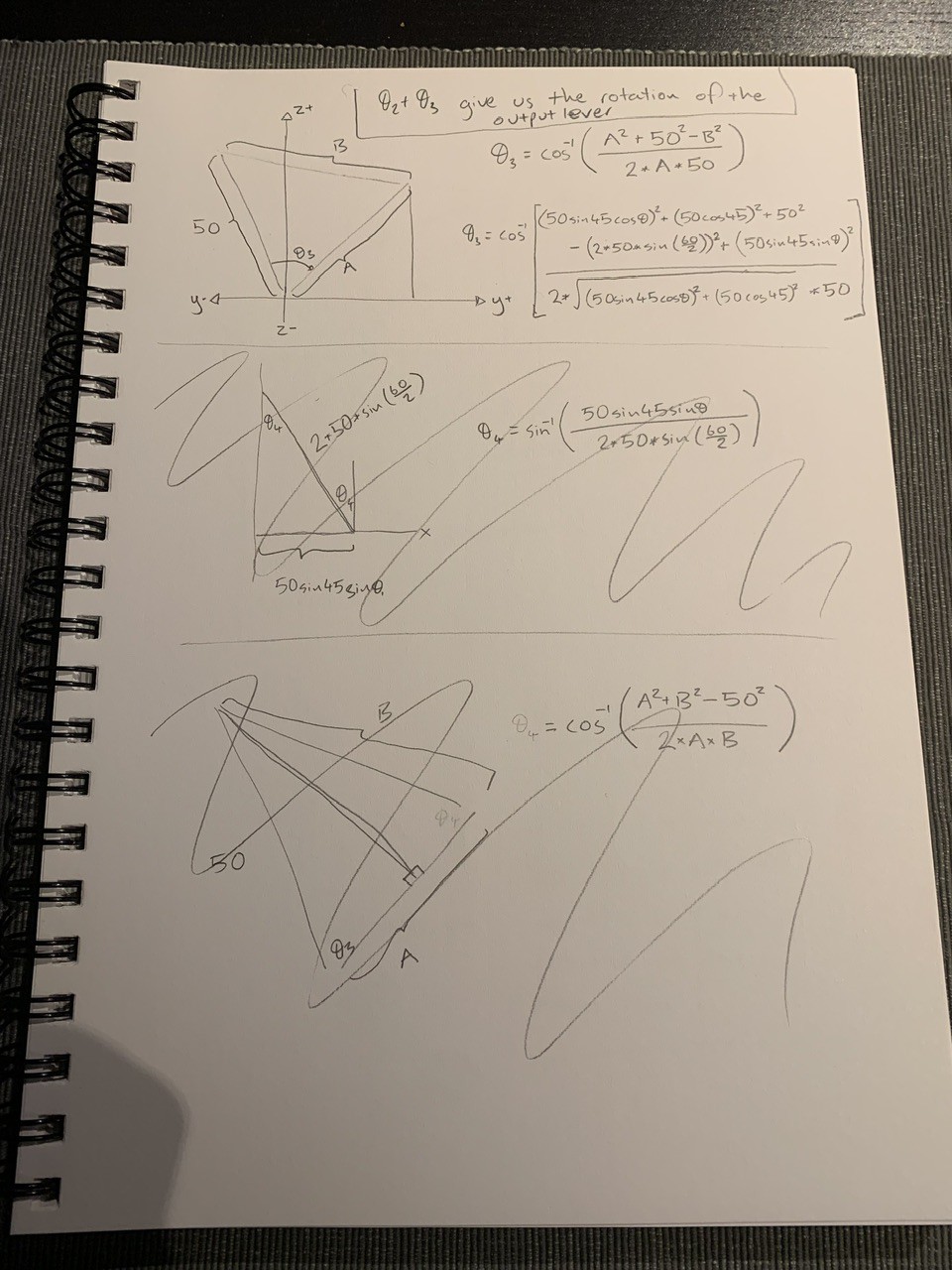
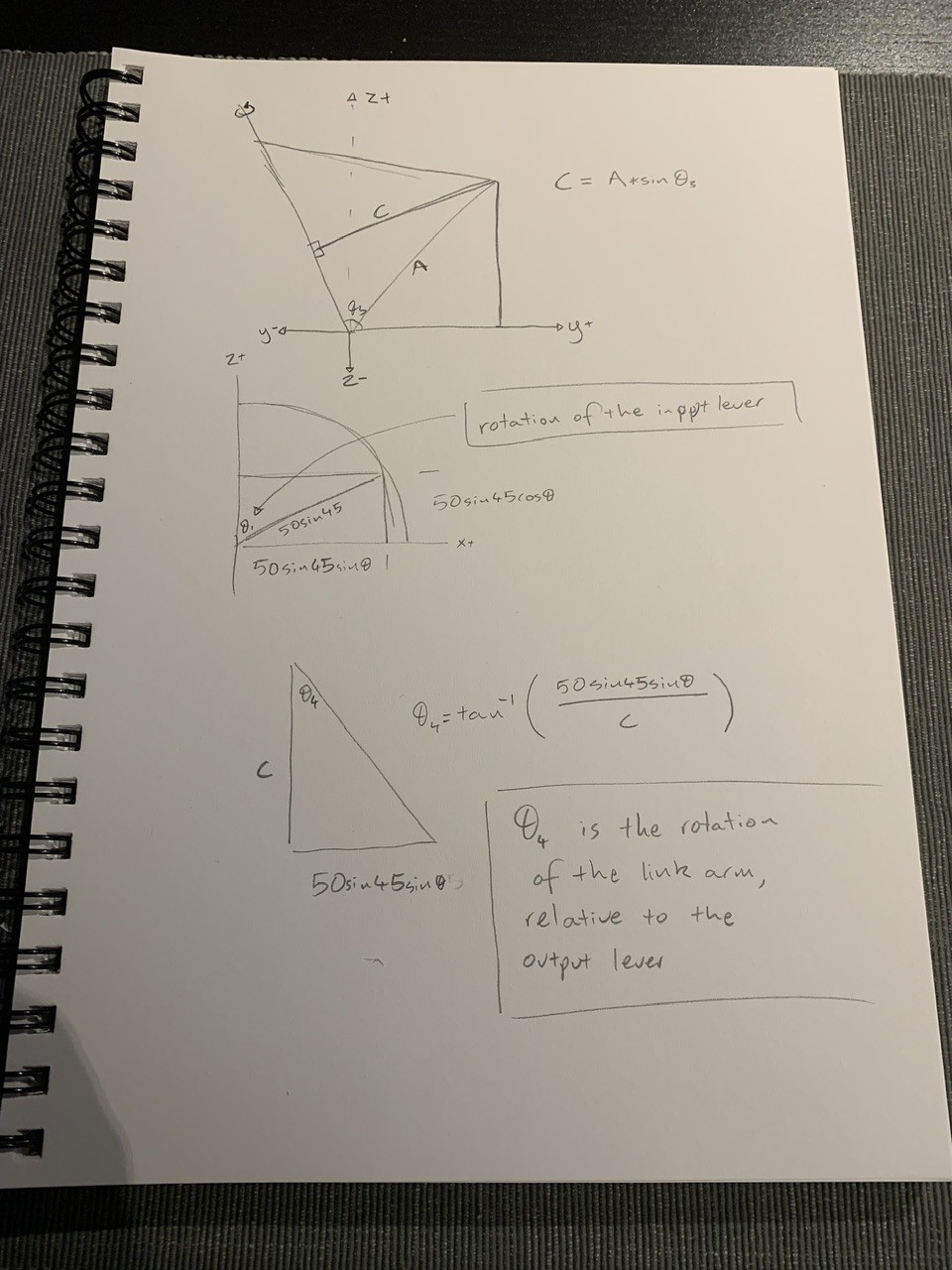
Anyway, it's finished now, so I wanted to share a little bit of the process of creating the kinematic model. What it came down to was maths. Hideous, horrifying quantities of trigonometry. The YouTube channel ThisOldTony describes trigonometry as "shop math" - math for the machine shop - and while that's accurate, trigonometry really does feel like a blunt instrument at times. Is there a better way to do this? Probably, but I'm afraid I never learnt it...
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.