 Mukesh Sankhla
Mukesh Sankhla-
11Final Assembly
To assemble the project:
- Align the Type-C port on the XIAO ESP32 with the corresponding opening in the 3D printed housing.
- Carefully place the circuitry into the housing, ensuring that component fits snugly.
![]()
![]()
![]()
- Slide the top cover onto one side of the housing.
- Use a small screw to fix the top cover securely onto the housing, ensuring that the entire assembly is stable and well-enclosed.
![]()
![]()
-
12Code
- Download the Grove Gesture Sensor library
- Since you have downloaded the zip Library, open your Arduino IDE, click on Sketch > Include Library > Add .ZIP Library. Choose the zip file you just downloaded,and if the library install correct, you will see Library added to your libraries in the notice window. Which means the library is installed successfully.
![]()
- Also you should install the Arduino ESP32 boards in board manager, you can follow Getting Started | Seeed Studio Wiki to install.
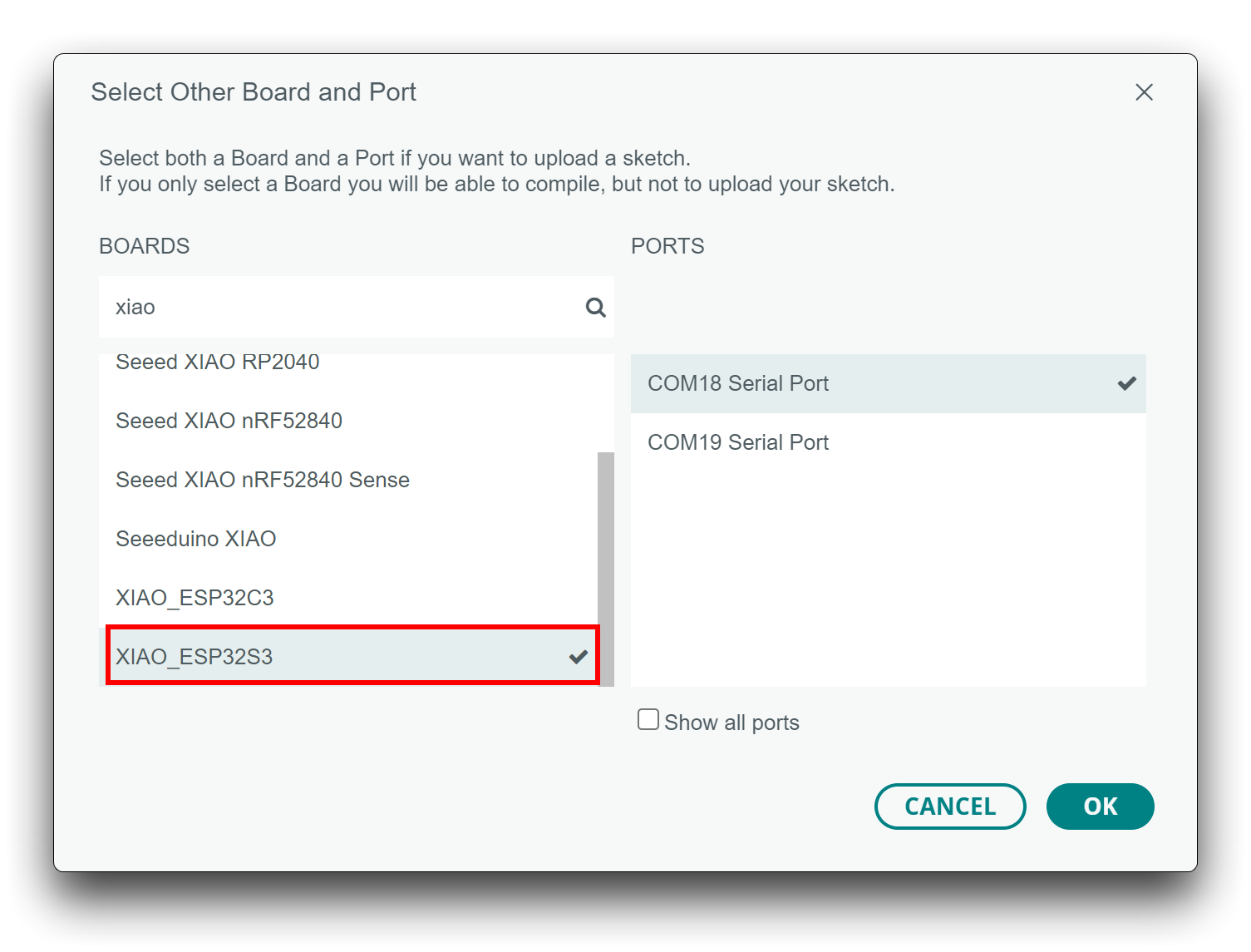
- Now copy paste the code, select the board type, search for xiao in the development board on the left. select XIAO_ESP32S3, select the port and upload the code.
![]()
Remote(Sender) Code
/* Project : MicroMote * makerbrains.com 2023 * Author : Mukesh Sankhla */ #include <wifi.h> #include "Gesture.h" #include <esp_now.h> pag7660 Gesture; // Combined mode is used by default int deviceNo = 1; //Universal Mac Address uint8_t broadcastAddress[] = {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF}; //Message(Data) send and receive doc typedef struct messageData { int color = 0; } messageData; messageData deviceData; //Local Data messageData recData; //Received Data // Create peer interface esp_now_peer_info_t peerInfo; //Called when data is sent void OnDataSent(const uint8_t *mac_addr, esp_now_send_status_t status) { Serial.print("\r\nLast Packet Send Status:\t"); Serial.println(status == ESP_NOW_SEND_SUCCESS ? "Delivery Success" : "Delivery Fail"); } //Called when data is recived void OnDataRecv(const uint8_t * mac, const uint8_t *incomingData, int len) { memcpy(&recData, incomingData, sizeof(recData)); Serial.print("Bytes received: "); Serial.println(len); Serial.println(recData.color); } //Declare the send result esp_err_t resultt; void setup() { Serial.begin(9600); while(!Serial) { delay(100); } Serial.println("\nPAG7660 TEST DEMO: Gesture combined mode."); if(Gesture.init()) { Serial.println("PAG7660 initialization success"); } else { Serial.println("PAG7660 initialization failed"); } Serial.println("Please input your gestures:\n"); WiFi.mode(WIFI_STA); if (esp_now_init() != ESP_OK) { Serial.println("Error initializing ESP-NOW"); return; } esp_now_register_send_cb(OnDataSent); esp_now_register_recv_cb(OnDataRecv); memcpy(peerInfo.peer_addr, broadcastAddress, 6); peerInfo.channel = 0; peerInfo.encrypt = false; // Add peer if (esp_now_add_peer(&peerInfo) != ESP_OK) { Serial.println("Failed to add peer"); return; } recData.color = deviceNo; } void loop() { pag7660_gesture_t result; if (Gesture.getResult(result)) { printResultCombinedMode(result); } delay(100); } void printResultCombinedMode(const pag7660_gesture_t& result) { const char *cursor_str[] = { NULL, "Tap", "Grab", "Pinch", }; switch (result.type) { case 0: switch (result.cursor.type) { case 1: case 2: case 3: if (result.cursor.select) Serial.println(cursor_str[result.cursor.type]); break; default: break; } break; case 1: deviceData.color = recData.color = 1; resultt = esp_now_send(broadcastAddress, (uint8_t *) &deviceData, sizeof(deviceData)); delay(2000); break; case 2: deviceData.color = recData.color = 2; resultt = esp_now_send(broadcastAddress, (uint8_t *) &deviceData, sizeof(deviceData)); delay(2000); break; case 3: deviceData.color = recData.color = 3; resultt = esp_now_send(broadcastAddress, (uint8_t *) &deviceData, sizeof(deviceData)); delay(2000); break; case 4: deviceData.color = recData.color = 4; resultt = esp_now_send(broadcastAddress, (uint8_t *) &deviceData, sizeof(deviceData)); delay(2000); break; case 5: deviceData.color = recData.color = 5; resultt = esp_now_send(broadcastAddress, (uint8_t *) &deviceData, sizeof(deviceData)); break; case 6: break; case 7: break; case 8: break; case 9: break; case 19: deviceData.color = recData.color = 6; resultt = esp_now_send(broadcastAddress, (uint8_t *) &deviceData, sizeof(deviceData)); delay(2000); break; case 20: deviceData.color = recData.color = 7; resultt = esp_now_send(broadcastAddress, (uint8_t *) &deviceData, sizeof(deviceData)); delay(2000); break; case 21: deviceData.color = recData.color = 8; resultt = esp_now_send(broadcastAddress, (uint8_t *) &deviceData, sizeof(deviceData)); delay(2000); break; case 22: deviceData.color = recData.color = 9; resultt = esp_now_send(broadcastAddress, (uint8_t *) &deviceData, sizeof(deviceData)); delay(2000); break; case 23: deviceData.color = recData.color = 10; resultt = esp_now_send(broadcastAddress, (uint8_t *) &deviceData, sizeof(deviceData)); delay(2000); break; default: break; } }- Take a any ESP32 board that you have to use it as test receiver and upload the following code.
Receiver Code
/* Project : MicroMote * makerbrains.com 2023 * Author : Mukesh Sankhla */ #include <esp_now.h> #include <wifi.h> //Universal Mac Address uint8_t broadcastAddress[] = {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF}; //Message(Data) send and receive doc typedef struct messageData { int color = 0; } messageData; messageData deviceData; //Local Data messageData recData; //Received Data // Create peer interface esp_now_peer_info_t peerInfo; //Called when data is sent void OnDataSent(const uint8_t *mac_addr, esp_now_send_status_t status) { Serial.print("\r\nLast Packet Send Status:\t"); Serial.println(status == ESP_NOW_SEND_SUCCESS ? "Delivery Success" : "Delivery Fail"); } //Called when data is recived void OnDataRecv(const uint8_t * mac, const uint8_t *incomingData, int len) { memcpy(&recData, incomingData, sizeof(recData)); Serial.print("Bytes received: "); Serial.println(len); Serial.println(recData.color); } //Declare the send result esp_err_t result; void setup() { Serial.begin(115200); WiFi.mode(WIFI_STA); if (esp_now_init() != ESP_OK) { Serial.println("Error initializing ESP-NOW"); return; } esp_now_register_send_cb(OnDataSent); esp_now_register_recv_cb(OnDataRecv); memcpy(peerInfo.peer_addr, broadcastAddress, 6); peerInfo.channel = 0; peerInfo.encrypt = false; // Add peer if (esp_now_add_peer(&peerInfo) != ESP_OK) { Serial.println("Failed to add peer"); return; } } void loop() { //Your custom code }- After uploading the code open the terminal by connecting receiver device, parallelly turn on the MicroMote by charging the battery and make few gestures on the terminal you will see the incoming messages.
-
13Conclusion
![]()
![]()
![]()
![]()
In the demonstration video, I utilized Rainbow Lights that I had previously built as the receiver devices. The battery shown in the project was not used and is old, so it was not functional as intended. Therefore, I did not include the battery in my MicroMote. However, connecting the battery is a straightforward process.
I chose not to incorporate a power ON/OFF switch in the MicroMote because I plan to experiment with the Deep Sleep modes of the ESP32 in the future. You can easily add a switch with simple additional steps if needed.
Overall, MicroMote is a fun and compact project with limitless applications. The only limit is your creativity and how you choose to use it. If you enjoyed this project, please let me know in the comments below. If you've recreated or made any modifications to the project, don't forget to share your experience in the "I Made It" section. Thank you for your interest, and see you next time :)
MicroMote: The ESP-Now Based Gesture Remote
MicroMote: The ESP-Now Based Gesture Remote










Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.