 Brian Brocken
Brian BrockenFirst flight of the full scale flying delorean (19/09/2025 (DD,MM,YYYY))
Just posted a new video of the first flight of the full scale DeLorean on Youtube:
New Carbon fiber airframe
The original aluminium airframe was to heavy and not ridgid enough because of the 3D-printed parts. There was only 1 material I could think of that would be light and sturdy enough for this application which is: Carbon Fiber.
I designed a tubular frame that would be held together with "forged carbon fiber" corners. The "forged carbon fiber" corners (It's technically not forged but i have no other way of naming it) are made using 3D-printed molds which are filled with loose fibers, combined with a resin and then pressed together with clamps.
The carbon fiber tubes and corners are held together with the same resin I used to make the corners with.
After the frame was assembled, i added extra diagonal steel wires to reduce the remaining torsion in the frame.
I also used a large foam EPS block in between the drone to simulate the EPS foam DeLorean body (and to add extra ridgidity to the drone frame during test flights).

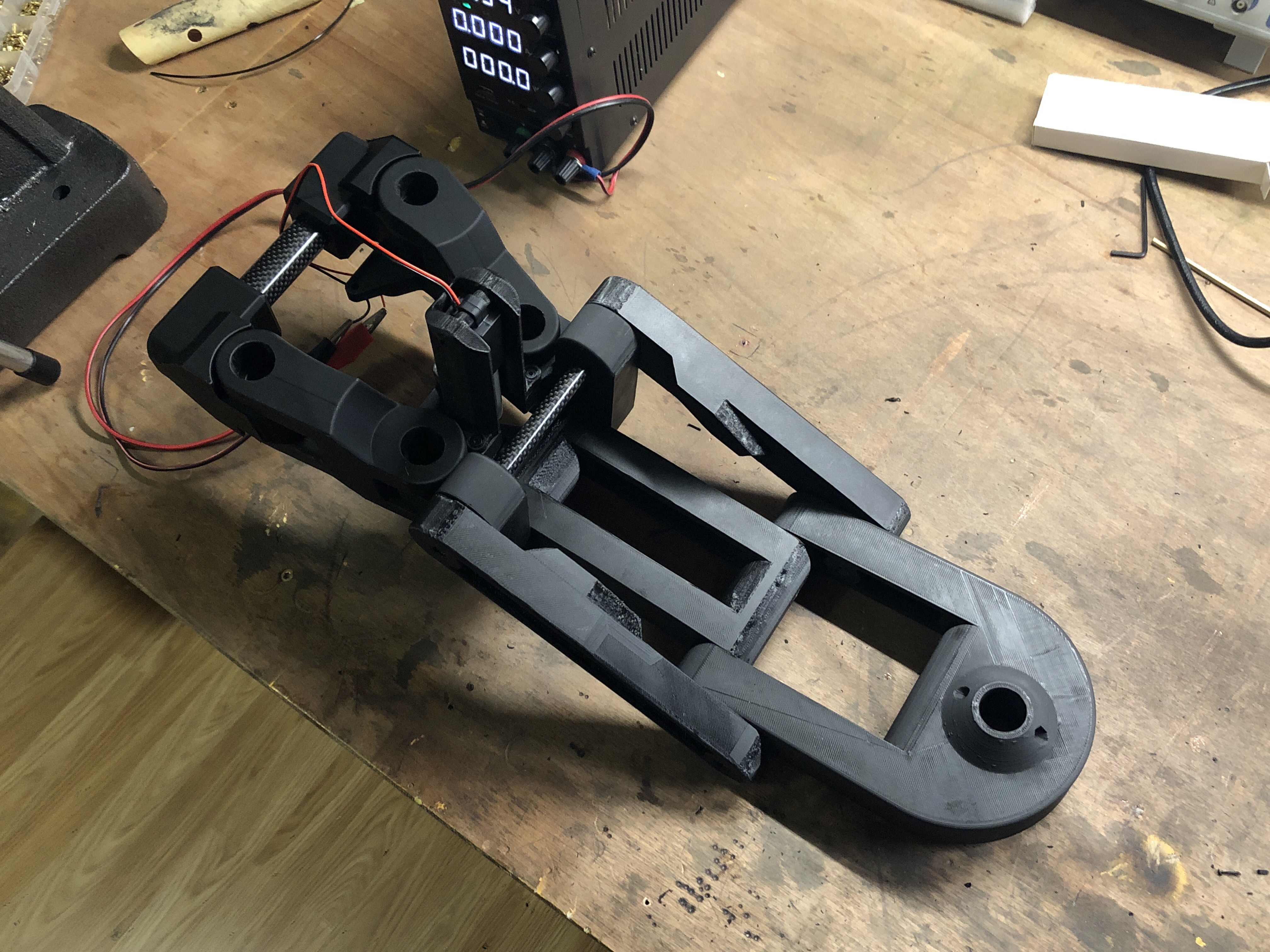
Wheel retract, steering and driving mechanisms
I wanted the DeLorean to have retractable wheels (just like in the Back to the future movies), while also being able to steer and drive the car. The combination of the different movements, and the requirement to support the full weight of the car resulted in a complex mechanism that took some time to figure out. An additional factor was that the wheels need to be brought further out, to not hinder the airflow of the propellers.
I decided to 3D-print the mechanisms in PLA (2 outer perimeters and 5-10% infill), which turned out to be sturdy enough and even allow for some harder landings. The mechanisms weigh about 650 grams per wheel for the front, and about 1kg per wheel in the back (these have an extra motor to drive the wheels).
In the future, I plan on redesigning these machanisms in carbon fiber in order to reduce the weight and make them more compact for better airflow of the propellers.
Thrust Vector Control (TVC) (yaw) flaps
After the foam EPS DeLorean body was placed on the drone, I noticed I had very little control over the yaw axis of the car. This resulted in a max yaw output of the flightcontroller where 2 of the 4 motors were at max throttle and the 2 others weren't doing that much. This made the car lower (fall) out of the air, because it was basically flying on 2 motors.
For this reason I decided to make some TVC fins (yaw flaps) that could better control the airflow under the propellers to guide them in the desired direction.
Because this is no standard option in the flight controller (a SpeedyBee F405 wing) and I'm unfamiliar with Luna scripting in the flightcontroller, I decided to copy the the output from the motors to 4 free channels of the flightcontroller. I then used an Arduino Nano to read these 4 channels and mix the output to the flaps so they only react to the desired yaw output (and not also roll output, I tried this but this made the Delorean oscilate). This ended up working great and gave me a lot more control authority over the yaw axis.

Second update of the project (01/07/2024 (DD,MM,YYYY))
(first update see further down)
This is the second part of the Full scale flying Delorean project where I finish up some mechanisms on the car like the front hood louvres and automatic doors. I also build an initial test frame for the drone out of some spare aluminium profiles I had lying around from a previous project. Second part video of the project can be found here:
Building the airframe
As mentioned above, I recently build an initial test frame for the drone out of some spare aluminium profiles I had lying around from a previous project. The frame is being held together by 3D-printed parts made from PLA plastic. Weighing in at around 8-9 kg this frame will probably to heavy to carry...
Read more »


 willy aenlle
willy aenlle
 Maximiliano Palay
Maximiliano Palay
 Tony Goacher
Tony Goacher
Hi Brian -- really looking forward to this! Wrote it up for the blog, should publish soon. Great stuff!