After a bit of a wait (I've been busy on other projects) I've finally been able to get back to the V2 feeder or singulator.
First I knocked up some quick code to allow me to tune the frequency and pulse width of the PWM driving the solenoid (model JF-0530B 12V electromagnet driven by half of a DRV8871 H-bridge motor driver). That helped me then tune the solenoid and its plunger - in the end making a new plunger from scratch, using a nylon rod to save weight and permit a bit of lateral movement/flexibility so that it doesn't bind so much. This means the feeder is able to vibrate freely, at resonance, for maximum efficiency.

Finally I added a light sensor/beam break arrangement to detect falling pieces and stop the PWM temporarily.
A video of its first test is below:
The light sensor is a repurposed HW-201 proximity module, fitted into a custom 3d printed housing which directs the IR beam onto a mirror and back.
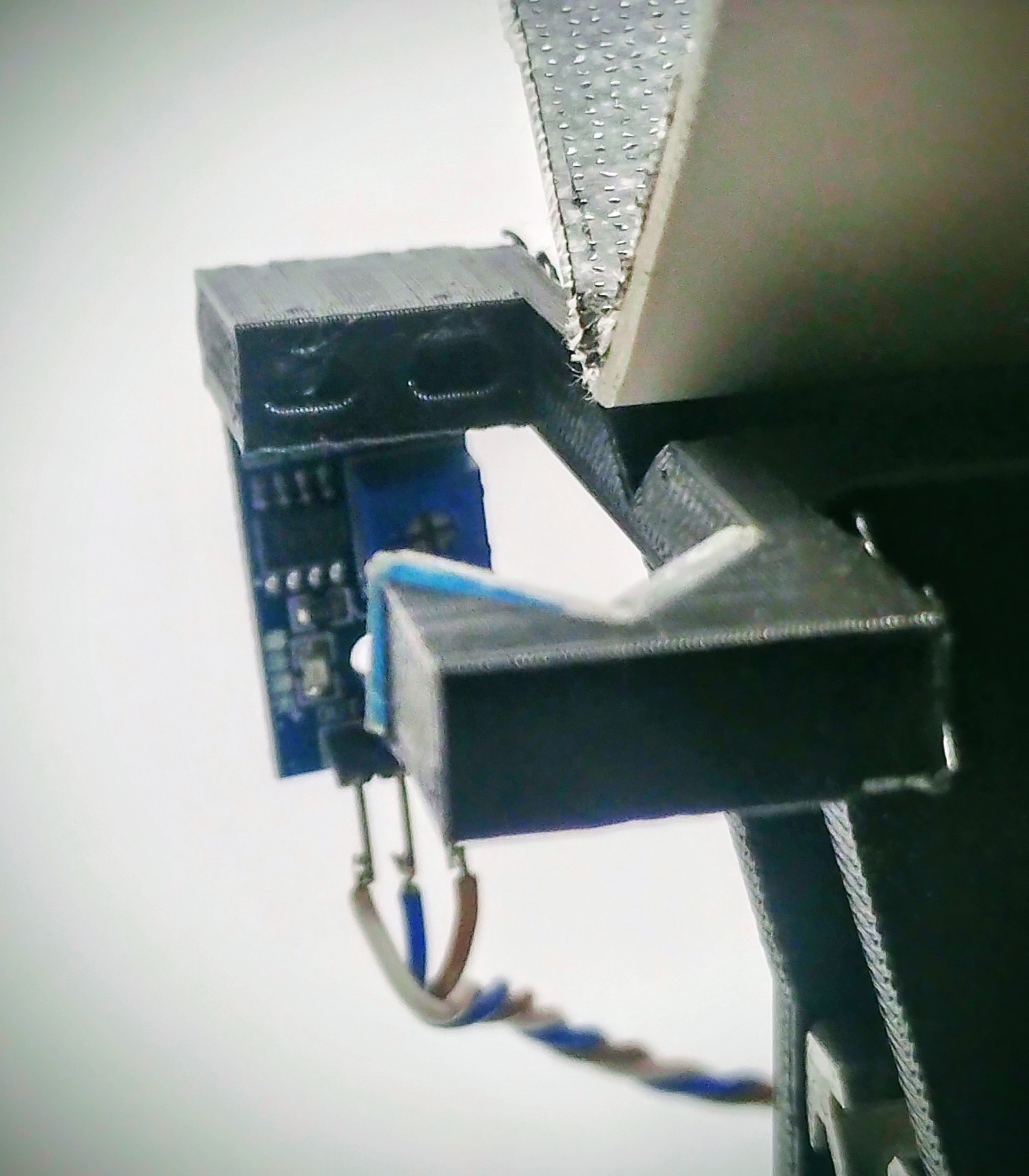
This effectively creates two side-by-side beams, doubling the chance of detecting a Lego piece as it falls off the end of the channel.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.