0%
0%
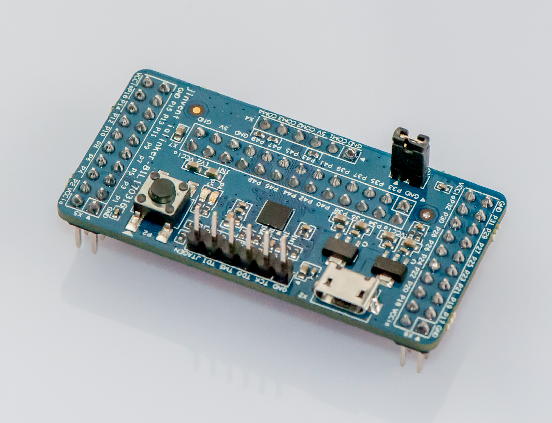
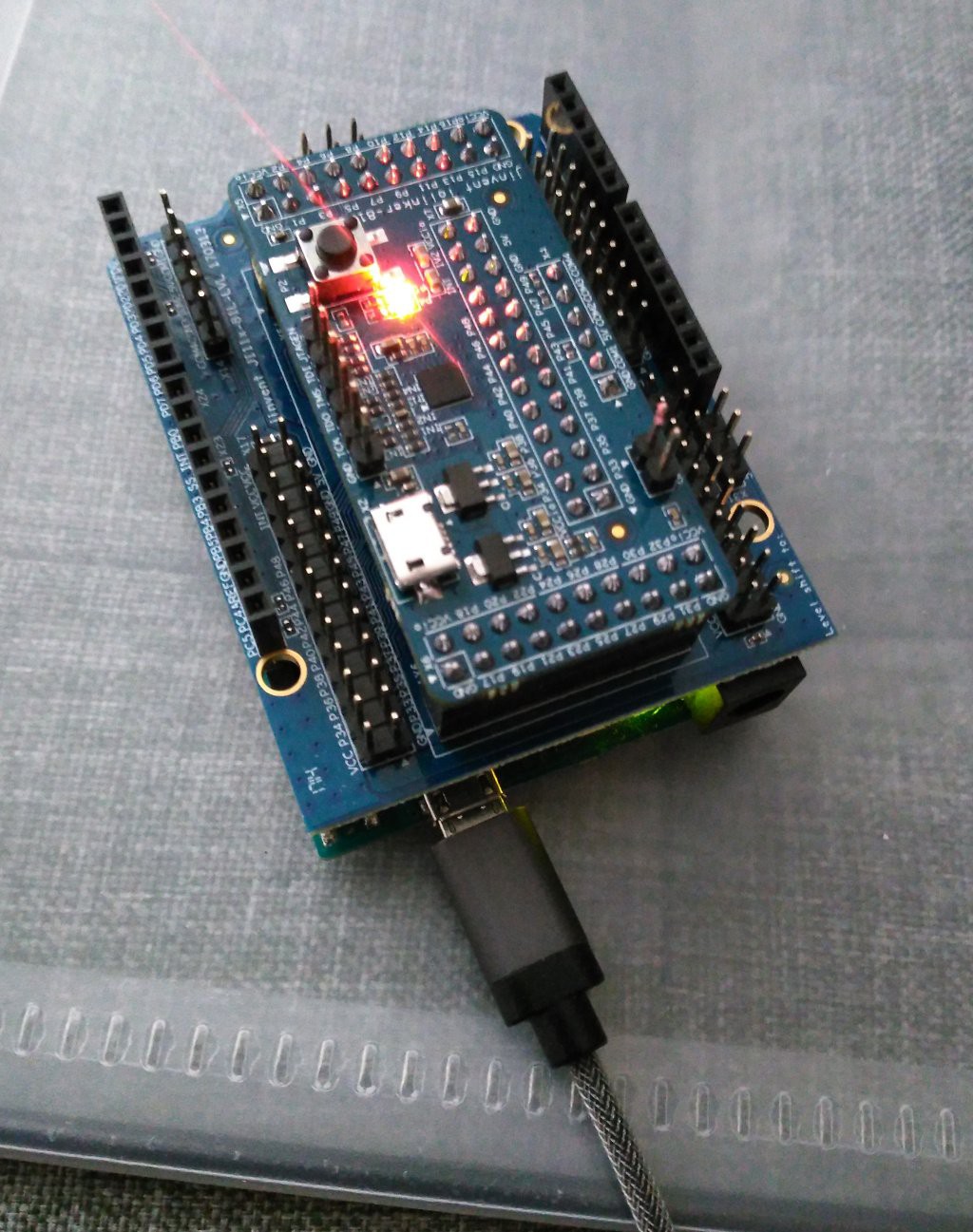
Reconfigurable electronics & IO extension
Reconfigurable electronics -- easy to use for Arduino, Raspberry & Co. with a preprogrammed FPGA board.
 Julian
JulianBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests



 Chris
Chris
 Alexander Kirillov
Alexander Kirillov
 Valentin Angelovski
Valentin Angelovski
 Rishi
Rishi
antti.lukats, thanks for your comment. You are correct about that value not making much sense. Internal oscillator clock is 66.5 MHz, so jitter and duty cycle not accounted for we should end up with ~31.6 MHz safe LNK frequency (i.e. 5.5% clock derivation and 50% Shannon-Nyquist subtracted). Not sure how to include the jitter / duty cycle part accurately? I was under the impression that was included in the synthesis constraints.