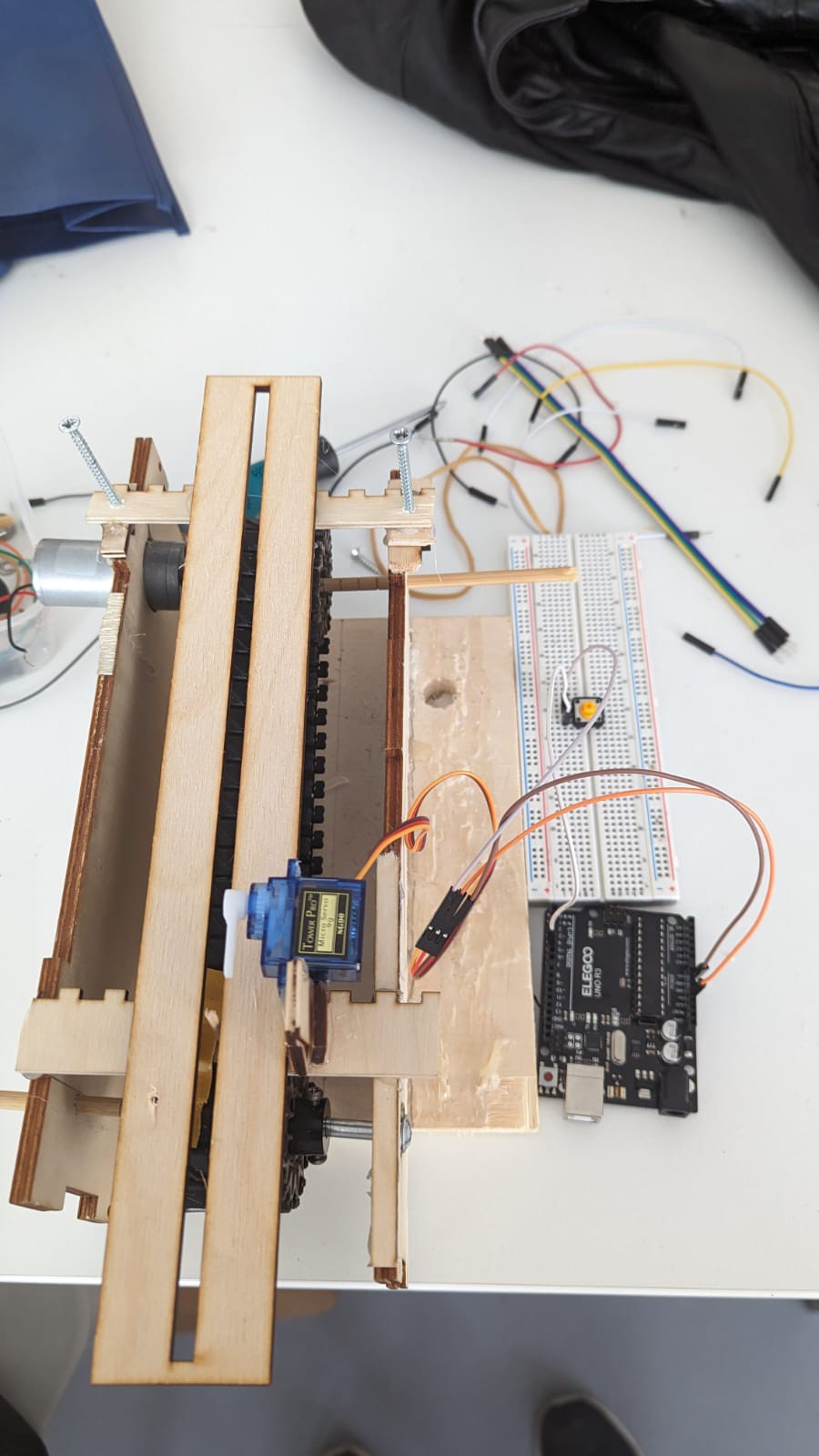
With the help of an arduino UNO, a servo SG90 and a micro interuptor, we have assembled the holding mechanism for the crossbow. When the conveyor belt pulls the elastic back, the servo will activate causing its arm to rotate 90 degrees downwards and hold the elastic. It will hold it for 3 seconds until it moves back to its original position releasing the arrow. Here is the code below. We also added support to the axes for the conveyor belt to make sure it stays stable and straight.
#include <Servo.h>
Servo interupteur;
void setup() {
interupteur.attach(9);
void loop() {
interupteur.write(90);
delay(3000);
interupteur.write(180); delay(3000);
}
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.