 Fabian
FabianSince balcony solar systems are very popular here in Germany, I kept asking myself how to further improve the energy yield of two to four PV modules in a practical and affordable way.
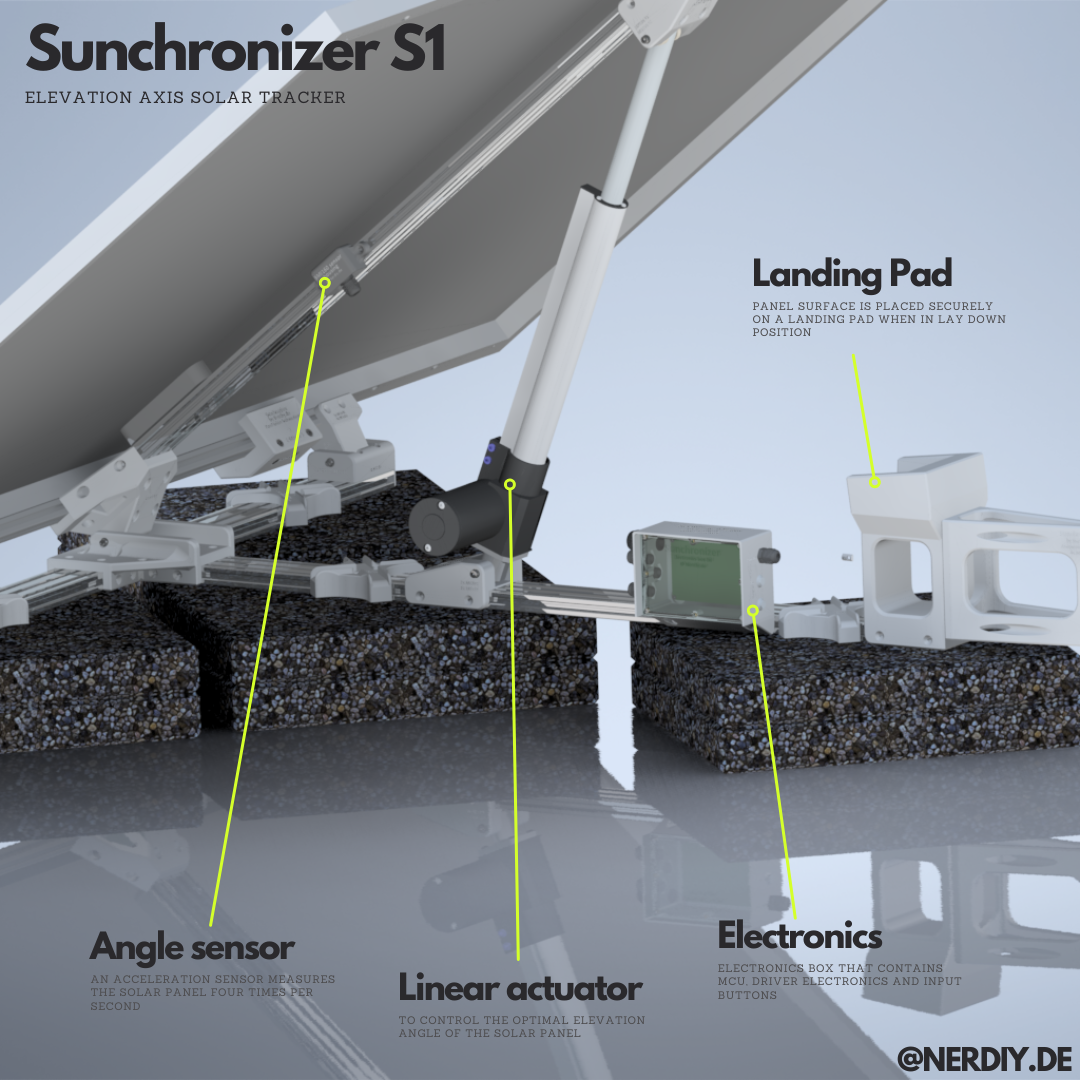
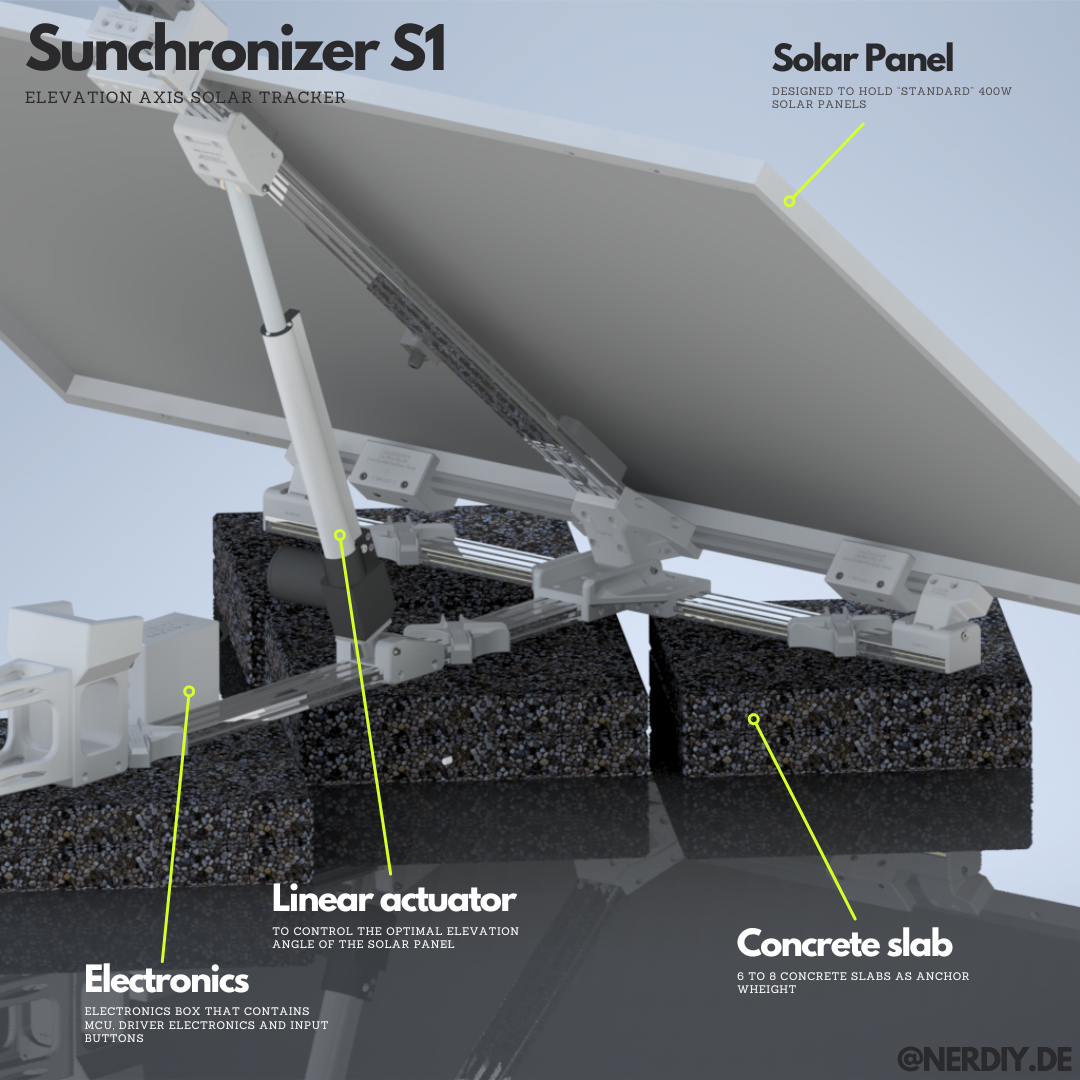
Sunchronizer started as S1 (single-axis) and has now evolved into a full family of trackers:
- S1 and S2: single-axis tracking (elevation)
- D1 and D2: dual-axis tracking (elevation + azimuth)
The goal across all variants is the same: use mostly 3D-printed parts plus standard hardware so builders can reproduce the system themselves.
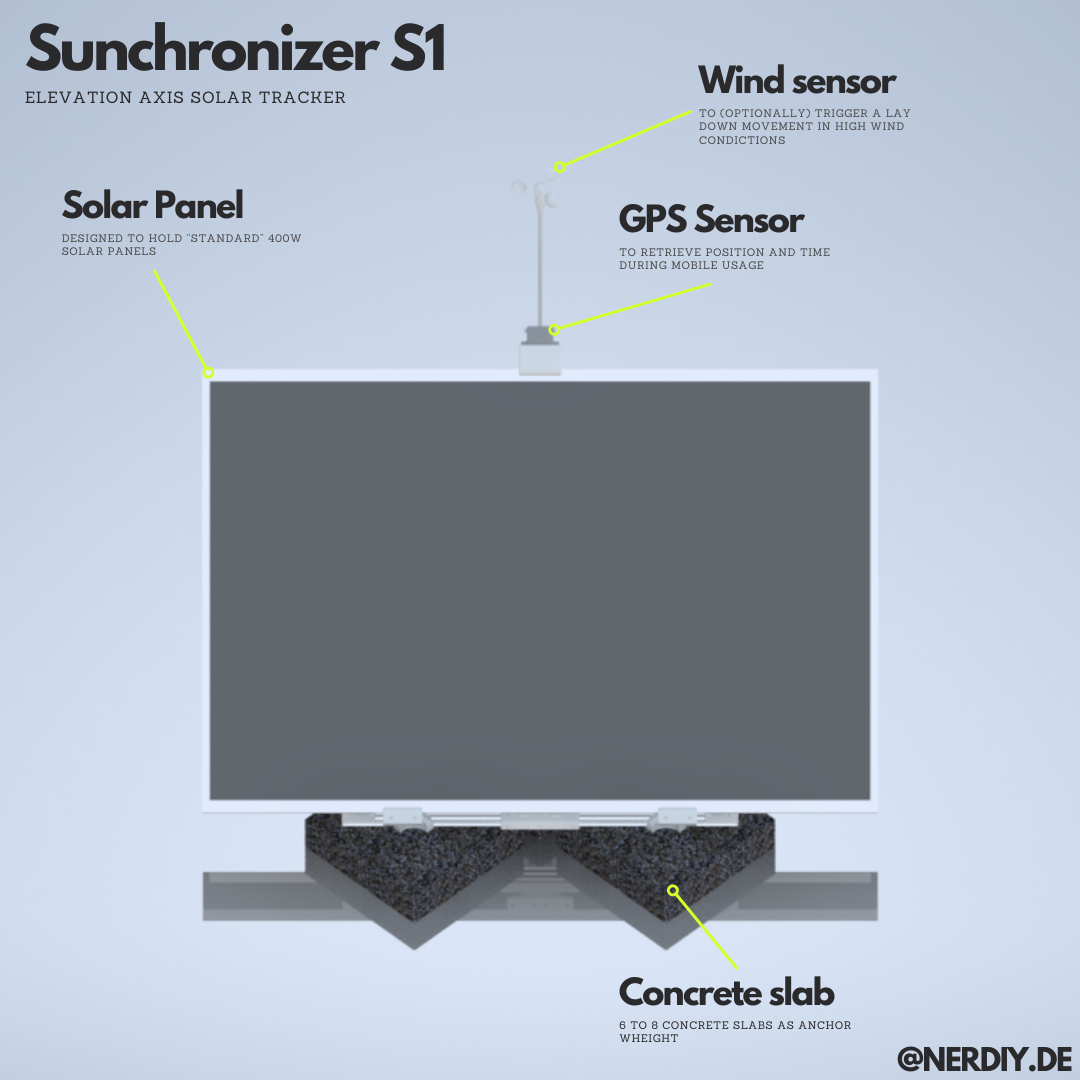
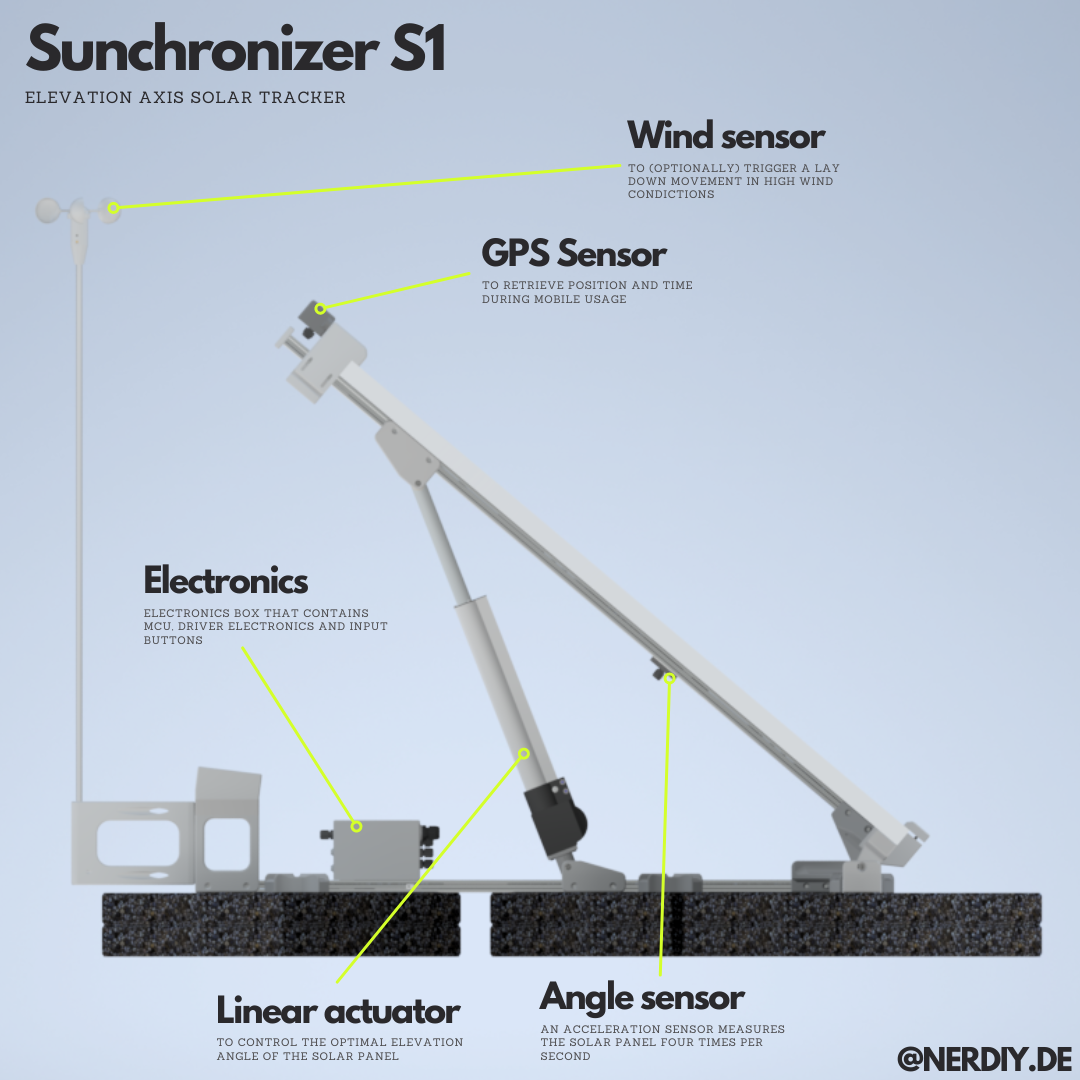
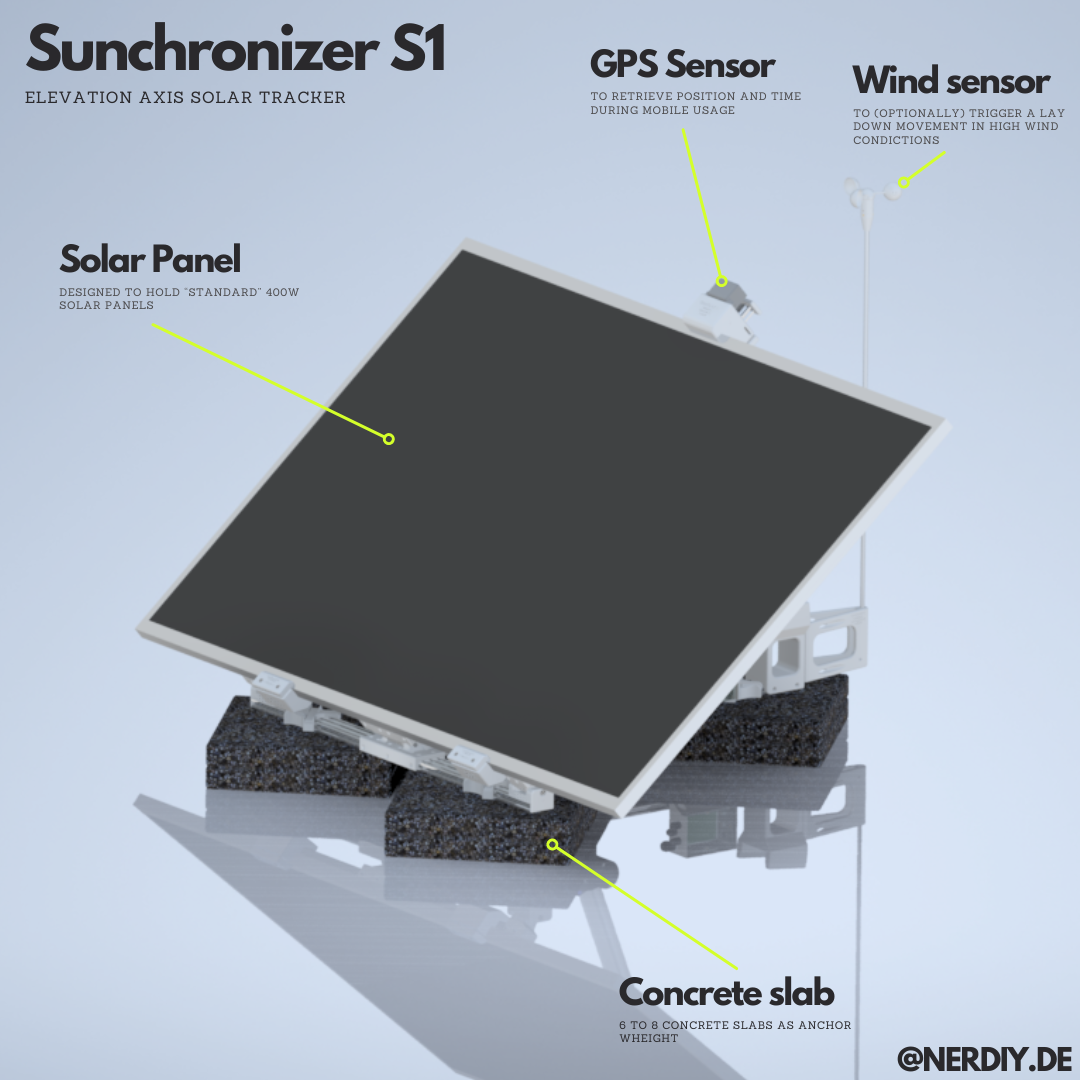
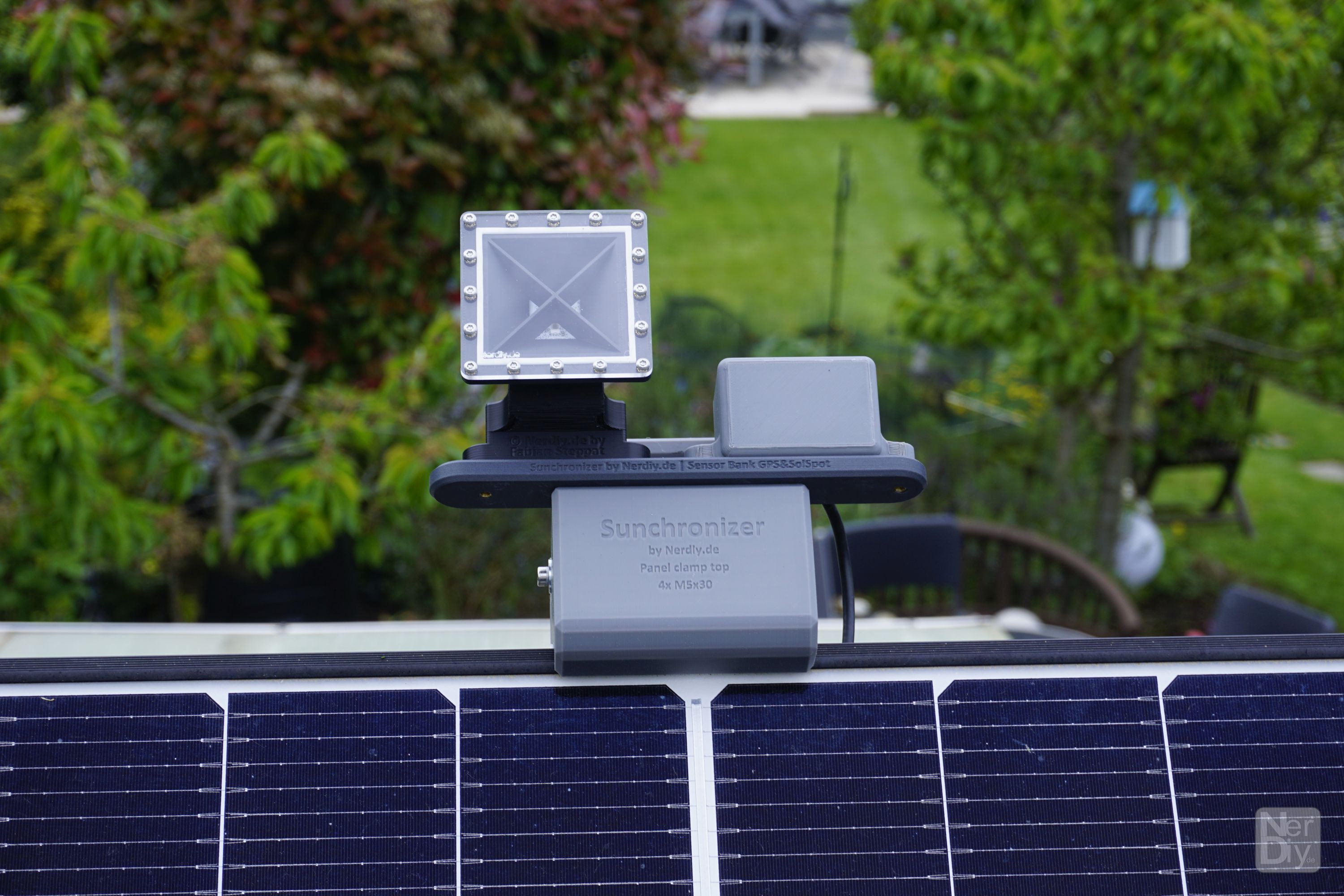
Tracking is driven by a 6000N linear actuator (elevation) and controlled by an ESP32 with dedicated motor electronics. The firmware is based on ESPHome, which makes integration into Home Assistant straightforward, while still allowing standalone operation. In standalone mode, position/time can be provided by GPS, and the controller computes the optimal target angles from location, time, and configured system orientation. Panel angle and heading are continuously monitored by IMU/compass sensors and corrected during runtime as needed.
Real-world measurement campaigns are published regularly and show clear gains:
- about +12% yield for dual-axis (D2) vs single-axis (S2)
- up to +144% vs static east/west references (time-window dependent comparison)
Further info and resources:
Short note: the firmware/configuration is open source. STL files are available via my shop/platform listings.
Project repository (docs, firmware, measurements): https://github.com/Nerdiyde/Sunchronizer
Measurement overview (with links to detailed reports): https://github.com/Nerdiyde/Sunchronizer/blob/main/docu/measurements/MEASUREMENT_OVERVIEW.md
STL files, technical data, and dimensions:
- Sunchronizer S1 (single-axis, 1st gen): https://nerdiy.de/en/product-2/sunchronizer-s1-400w-solartracker-fuer-elevation-achse-3d-druckbar-stl-dateien/
- Sunchronizer D1 (dual-axis, 1st gen): https://nerdiy.de/en/product-2/sunchronizer-d1-dual-axis-solartracker-fuer-azimut-und-elevation-achse-3d-druckbar-stl-dateien/
- Sunchronizer S2 (single-axis, 2nd gen, Printables): https://www.printables.com/model/1574048-sunchronizer-s2-400w-module-solartracker-for-eleva
- Sunchronizer S2 (single-axis, 2nd gen, Cults): https://cults3d.com/de/modell-3d/gadget/sunchronizer-s2-400w-module-solartracker-for-elevation-axis-by-nerdiy-de-new
- Sunchronizer D2 (dual-axis, 2nd gen, Printables): https://www.printables.com/model/1574049-sunchronizer-d2-400w-module-solartracker-for-eleva
- Sunchronizer D2 (dual-axis, 2nd gen, Cults): https://cults3d.com/de/modell-3d/gadget/sunchronizer-d2-400w-module-solartracker-for-elevation-azimuth-axis-by-nerdi





Support:
If you want to support me, you can do so by like on this project page, on Instagram or by donating a coffee. :)
Licenses:
Content that is not based on software/code: Unless otherwise stated, all works presented here that are not based on software/code are subject to the CC BY-NC-SA 4.0 license (attribution – non-commercial – dissemination under the same conditions 4.0 international).
You can find a summary here: https://creativecommons.org/licenses/by-nc-sa/4.0/deed.de
You can find the complete legal text here: https://creativecommons.org/licenses/by-nc-sa/4.0/legalcode.de
Software/code-based works Unless otherwise stated, all software/code-based works presented here are subject to the GNU Affero General Public License v3.0
You can find a summary here: https://tldrlegal.com/license/gnu-affero-general-public-license-v3-(agpl-3.0)#summary
The complete legal text can be found here: https://www.gnu.org/licenses/agpl-3.0.de.html