 kelvinA
kelvinA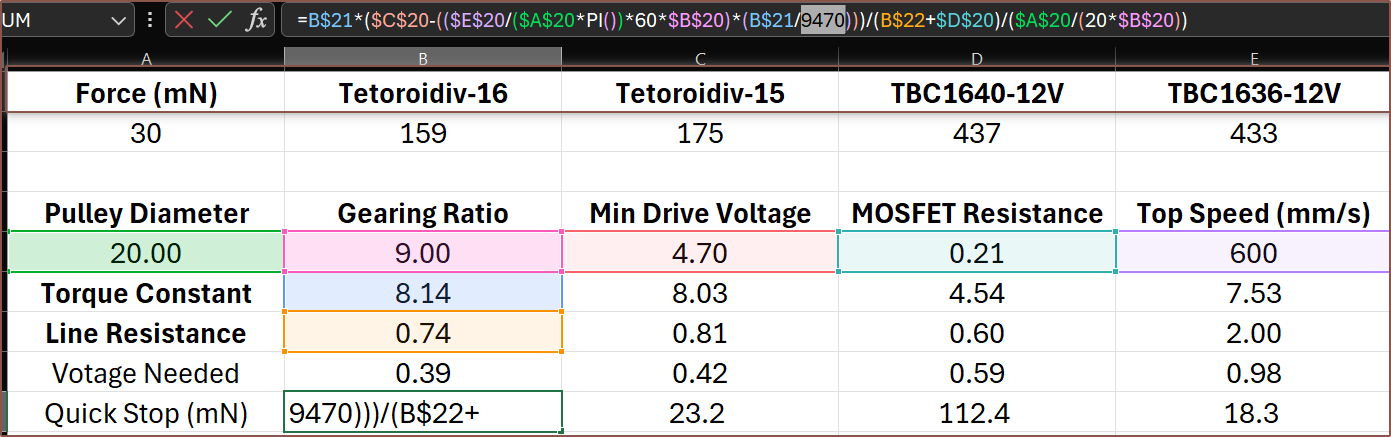
I've gone through all the 16mm brushless motor datasheets to find the constant that converts Kt to KV, and this is the data I have so far:
| 9.375 |
| 9.4125 |
| 9.425 |
| 9.4257 |
| 9.5625 |
| 9.5583 |
| 9.5468 |
| 9.5523 |
| 9.4572 |
| 9.4589 |
| 9.4674 |
| 9.4174 |
The average here is 9.47 which converts between mN.m to V/kRPM. To convert to V/RPM, the constant would be 9470.
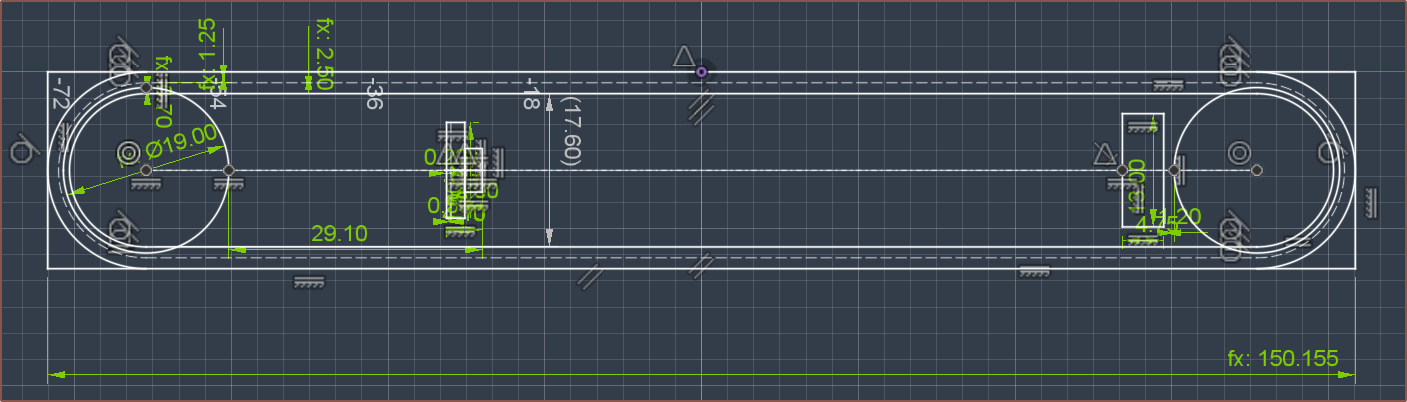
Due to the existence of 5PH belt, which should be 8mm wide, and 15mm wide FSRs, I did look into the possibility of using 5PH317 along with a 15mm diameter motor that has a 46mm rotor length. This length was chosen so that I could potentially use 50mm wide SS-430 foil.
However, because those 15mm wide FSRs have a 10kg range instead of a 500g range (implying lower resolution for sensing forces from 0 - 300gf) and because of this paper finding out that key spacing down to 17mm does not seem to affect typing speed, but 16mm, I don't think there are suitable benefits to try for a 15mm x 150mm Tetrinsic.
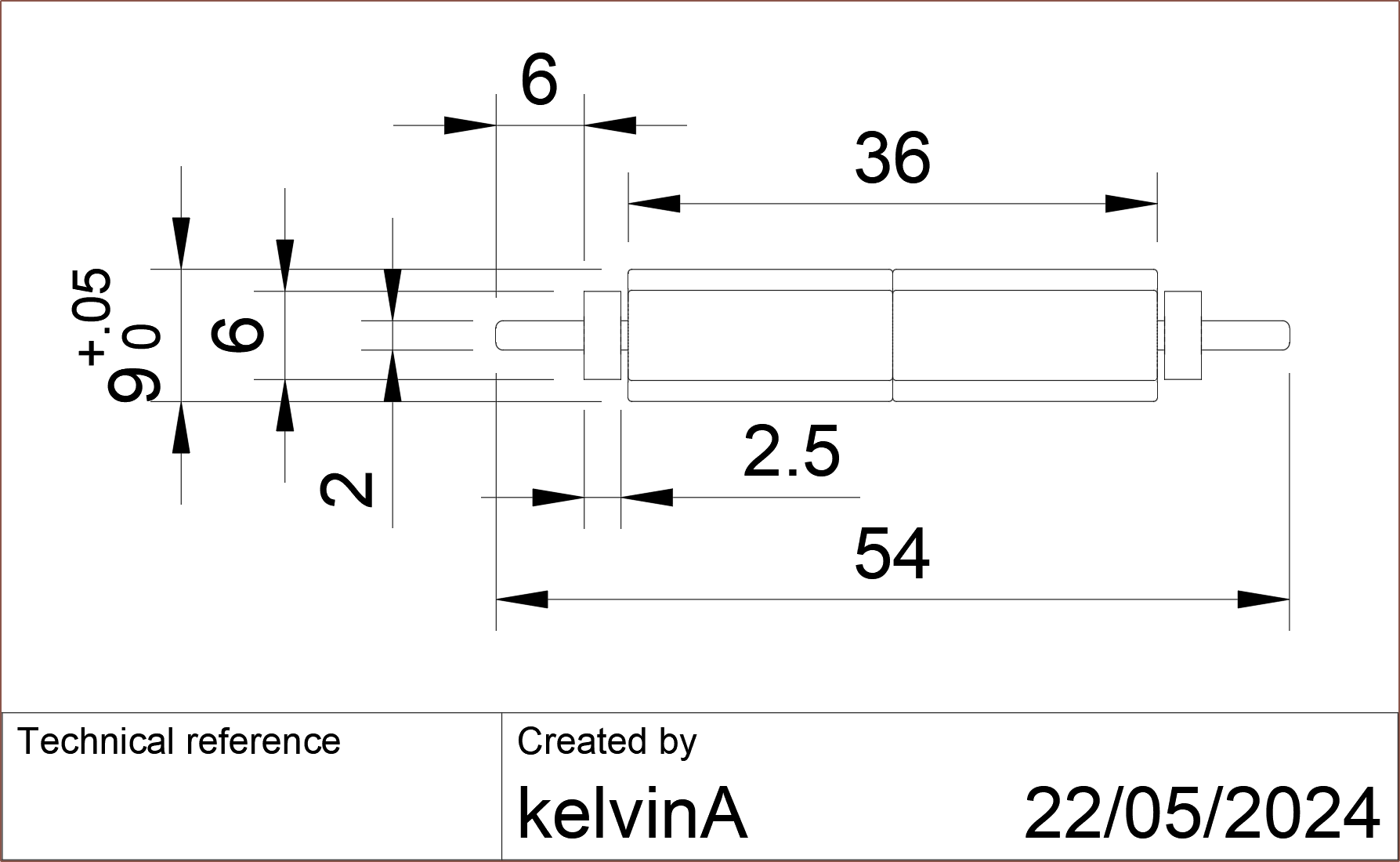
The following rotor design has seemed rather stable over these past few weeks so I've sent it to the rotor supplier:
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.