 Jared Fenster
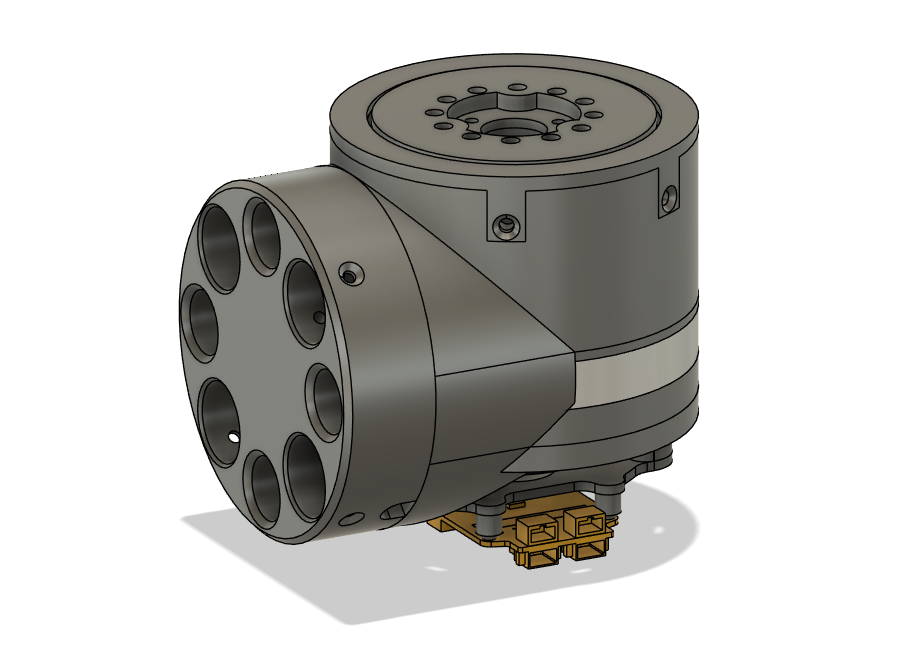
Jared FensterAfter a few weeks of designing and testing, I've finished the 4th joint design. The entire Joint should be up and running this weekend. Thankfully this will be the last joint that I need to design as the next two joints are exact copies of this one. This joint was super difficult as I had to achieve everything the last joints could in a smaller volume. The biggest issue was making the joint smooth enough for the tiny input motors to be able to use.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.