 Ehsan Abdi
Ehsan AbdiFor the mass shifter, steppers weren't strong enough so switch to geared DC motors. Since these motors are slightly larger, I needed to switch to the 50cm housing instead of the 30cm one.
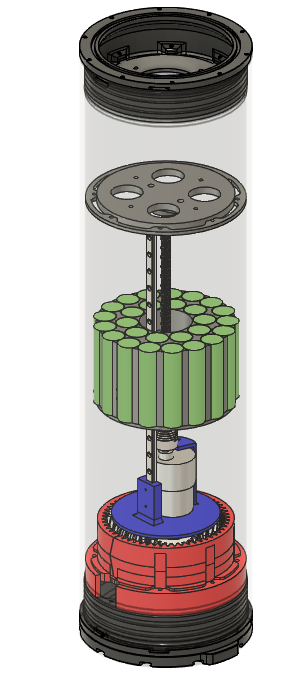
It's a quick and dirty design but does the job for now.
For the buoyancy drive, I played quite a bit with different types of molds for the diaphragm and finally managed to make one in silicon that has no holes. As for the seal, I used this parametric spring tool to make a large snap ring that would push the diaphragm to the housing and create a seal.
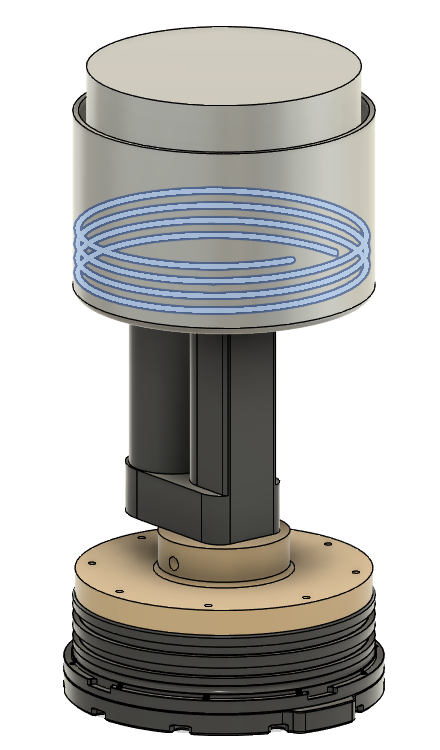
This together with a little bit of silicon adhesive did the job and I managed to pull a partial vacuum to test for leaks. Then I tested it in water and it does work! Managed to test it down to 5 meters but only have this shot from the initial test.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.