R. Scott Coppersmith
R. Scott CoppersmithThis project was a a modification of my bubble level project for the HexiWear device.
https://www.mikroe.com/hexiwear
This code was compiled on the mBed site that is now being removed.
https://os.mbed.com/platforms/hexiwear/
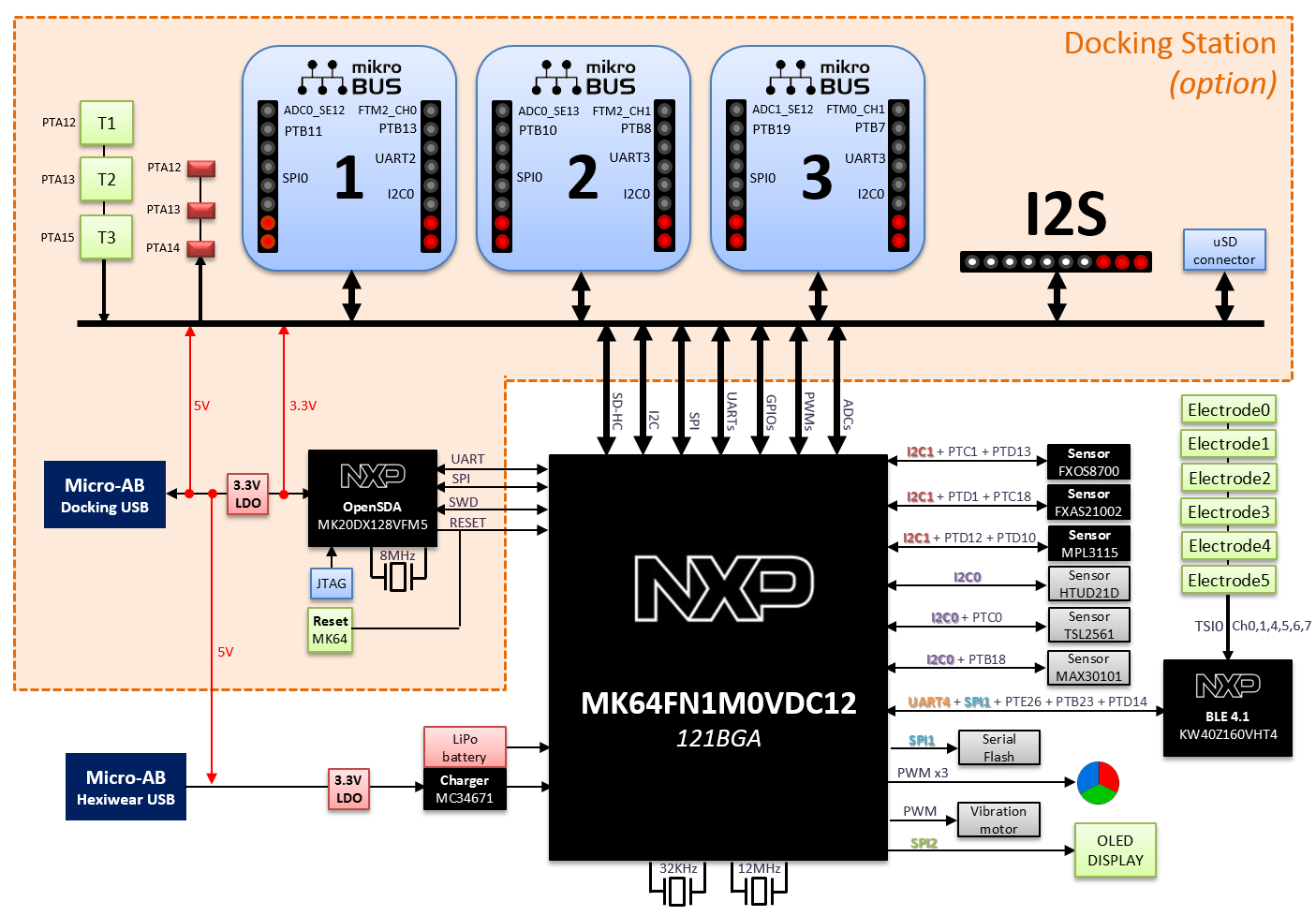
![]() There is a docking station available to add sensor and control boards.
There is a docking station available to add sensor and control boards.
![]()
![]()
![]() The internal sensors react to tilting the device and allows the pac-man to catch the balls.
//HexiGame.cpp
//R. Scott Coppersmith
//Build 23 September 2016
#include "mbed.h"
#include <SSD1351_SPI.h>
#include <HexiGame.h>
#include "FXOS8700.h"
#include "Hexi_KW40Z.h"
#define LED_ON 0
#define LED_OFF 1
void StartHaptic(void);
void StopHaptic(void const *n);
AnalogIn analog(PTB2);
Serial pc(USBTX, USBRX);
unsigned int m_z = 22222;
unsigned int m_w = 98764;
unsigned int rgen (void)
{
m_z = 36969 * (m_z & 65535) + (m_z >>16);
m_w = 18000 * (m_w & 65535) + (m_w >>16);
return ((m_z <<16) + m_w);
}
//SSD1351_SPI ( mosi, miso, sclk, cs, dc ) ;
SSD1351_SPI OLED96x96(PTB22,PTB23,PTB21,PTB20,PTD15);
// Pin connections for Hexiwear
FXOS8700 accel(PTC11, PTC10);
// Storage for the data from the sensor
float accel_data[3]; float accel_rms=0.0;
DigitalOut led1(LED1);
DigitalOut led2(LED2);
DigitalOut led3(LED3);
DigitalOut BOOSTEN(PTC13); //oled power enable
DigitalOut haptic(PTB9);
int count = 0;
int count2 = 0;
int count3 = 0;
extern const uint8_t Main_screen_bmp[ 36864 ];
int argb = 0xff000000;
int rgbd = 0x00000000;
int xposg = 0;
int yposg = 0;
int randx = 0;
int randy = 0;
int main() {
led1 = 1;
led2 = 1;
led3 = 1;
pc.printf("HexiGame \r\n");
// Configure Accelerometer FXOS8700
accel.accel_config();
BOOSTEN = 1;
OLED96x96.open();
OLED96x96.state(Display::DISPLAY_ON);
OLED96x96.fillRect(16,0,111,96,0xff000000);//alpha, BGR
for(int xpos=0;xpos<97;xpos++)
{
for(int ypos=0;ypos<96;ypos++)
{
rgbd = ((Main_screen_bmp[count+3]<<24)|(Main_screen_bmp[count]<<16)|(Main_screen_bmp[count+1]<<8)|(Main_screen_bmp[count+2]));
OLED96x96.drawPixel(ypos+16,xpos,rgbd);
count=count+4;
}
}
Thread::wait(6000);
while(1)
{
accel.acquire_accel_data_g(accel_data);
xposg=(accel_data[1]*(-50.0));
if (xposg > 36)
xposg = 36;
if (xposg < -36)
xposg = -36;
yposg=accel_data[0]*50.0;
if (yposg > 36)
yposg = 36;
if (yposg < -36)
yposg = -36;
OLED96x96.drawCircle(61-xposg,47+yposg,5,0xff00ff00);
OLED96x96.drawCircle(61-xposg,47+yposg,4,0xff00ff00);
OLED96x96.drawCircle(61-xposg,47+yposg,3,0xff00ff00);
OLED96x96.drawCircle(61-xposg,47+yposg,2,0xff00ff00);
OLED96x96.drawCircle(61-xposg,47+yposg,1,0xff00ff00);
Thread::wait(10);
OLED96x96.drawCircle(61-xposg,47+yposg,5,0xff000000);
OLED96x96.drawCircle(61-xposg,47+yposg,4,0xff000000);
OLED96x96.drawCircle(61-xposg,47+yposg,3,0xff000000);
OLED96x96.drawCircle(61-xposg,47+yposg,2,0xff000000);
OLED96x96.drawCircle(61-xposg,47+yposg,1,0xff000000);
if ((61-xposg == 40+randx) and (47+yposg == 40+randy))
{
pc.printf("Hit!\r\n");
led1 = LED_ON;
haptic = 1;
count3 = 0;
}
count3++;
count2++;
if ((count3 > 20)and (haptic == 1))
{
count2 = 101;
haptic = 0;
}
if (count2 > 100)
{ //blank display to avoid image burn
haptic = 0;
count3 = 0;
led1 = LED_OFF;
OLED96x96.fillRect(16,0,111,96,0xff000000);//alpha, BGR
count2 = 0;
randx = rgen()%40;
pc.printf("randx = %d\r\n",randx);
randy = rgen()%40;
pc.printf("randy = %d\r\n",randy);
OLED96x96.drawCircle(40+randx,40+randy,3,0xffff00ff);
OLED96x96.drawCircle(40+randx,40+randy,2,0xffff00ff);
OLED96x96.drawCircle(40+randx,40+randy,1,0xff00ff00);
}
//BOOSTEN = 0; //turn off display after about 1 minute to avoid image burn
}
}
The internal sensors react to tilting the device and allows the pac-man to catch the balls.
//HexiGame.cpp
//R. Scott Coppersmith
//Build 23 September 2016
#include "mbed.h"
#include <SSD1351_SPI.h>
#include <HexiGame.h>
#include "FXOS8700.h"
#include "Hexi_KW40Z.h"
#define LED_ON 0
#define LED_OFF 1
void StartHaptic(void);
void StopHaptic(void const *n);
AnalogIn analog(PTB2);
Serial pc(USBTX, USBRX);
unsigned int m_z = 22222;
unsigned int m_w = 98764;
unsigned int rgen (void)
{
m_z = 36969 * (m_z & 65535) + (m_z >>16);
m_w = 18000 * (m_w & 65535) + (m_w >>16);
return ((m_z <<16) + m_w);
}
//SSD1351_SPI ( mosi, miso, sclk, cs, dc ) ;
SSD1351_SPI OLED96x96(PTB22,PTB23,PTB21,PTB20,PTD15);
// Pin connections for Hexiwear
FXOS8700 accel(PTC11, PTC10);
// Storage for the data from the sensor
float accel_data[3]; float accel_rms=0.0;
DigitalOut led1(LED1);
DigitalOut led2(LED2);
DigitalOut led3(LED3);
DigitalOut BOOSTEN(PTC13); //oled power enable
DigitalOut haptic(PTB9);
int count = 0;
int count2 = 0;
int count3 = 0;
extern const uint8_t Main_screen_bmp[ 36864 ];
int argb = 0xff000000;
int rgbd = 0x00000000;
int xposg = 0;
int yposg = 0;
int randx = 0;
int randy = 0;
int main() {
led1 = 1;
led2 = 1;
led3 = 1;
pc.printf("HexiGame \r\n");
// Configure Accelerometer FXOS8700
accel.accel_config();
BOOSTEN = 1;
OLED96x96.open();
OLED96x96.state(Display::DISPLAY_ON);
OLED96x96.fillRect(16,0,111,96,0xff000000);//alpha, BGR
for(int xpos=0;xpos<97;xpos++)
{
for(int ypos=0;ypos<96;ypos++)
{
rgbd = ((Main_screen_bmp[count+3]<<24)|(Main_screen_bmp[count]<<16)|(Main_screen_bmp[count+1]<<8)|(Main_screen_bmp[count+2]));
OLED96x96.drawPixel(ypos+16,xpos,rgbd);
count=count+4;
}
}
Thread::wait(6000);
while(1)
{
accel.acquire_accel_data_g(accel_data);
xposg=(accel_data[1]*(-50.0));
if (xposg > 36)
xposg = 36;
if (xposg < -36)
xposg = -36;
yposg=accel_data[0]*50.0;
if (yposg > 36)
yposg = 36;
if (yposg < -36)
yposg = -36;
OLED96x96.drawCircle(61-xposg,47+yposg,5,0xff00ff00);
OLED96x96.drawCircle(61-xposg,47+yposg,4,0xff00ff00);
OLED96x96.drawCircle(61-xposg,47+yposg,3,0xff00ff00);
OLED96x96.drawCircle(61-xposg,47+yposg,2,0xff00ff00);
OLED96x96.drawCircle(61-xposg,47+yposg,1,0xff00ff00);
Thread::wait(10);
OLED96x96.drawCircle(61-xposg,47+yposg,5,0xff000000);
OLED96x96.drawCircle(61-xposg,47+yposg,4,0xff000000);
OLED96x96.drawCircle(61-xposg,47+yposg,3,0xff000000);
OLED96x96.drawCircle(61-xposg,47+yposg,2,0xff000000);
OLED96x96.drawCircle(61-xposg,47+yposg,1,0xff000000);
if ((61-xposg == 40+randx) and (47+yposg == 40+randy))
{
pc.printf("Hit!\r\n");
led1 = LED_ON;
haptic = 1;
count3 = 0;
}
count3++;
count2++;
if ((count3 > 20)and (haptic == 1))
{
count2 = 101;
haptic = 0;
}
if (count2 > 100)
{ //blank display to avoid image burn
haptic = 0;
count3 = 0;
led1 = LED_OFF;
OLED96x96.fillRect(16,0,111,96,0xff000000);//alpha, BGR
count2 = 0;
randx = rgen()%40;
pc.printf("randx = %d\r\n",randx);
randy = rgen()%40;
pc.printf("randy = %d\r\n",randy);
OLED96x96.drawCircle(40+randx,40+randy,3,0xffff00ff);
OLED96x96.drawCircle(40+randx,40+randy,2,0xffff00ff);
OLED96x96.drawCircle(40+randx,40+randy,1,0xff00ff00);
}
//BOOSTEN = 0; //turn off display after about 1 minute to avoid image burn
}
}