0%
0%
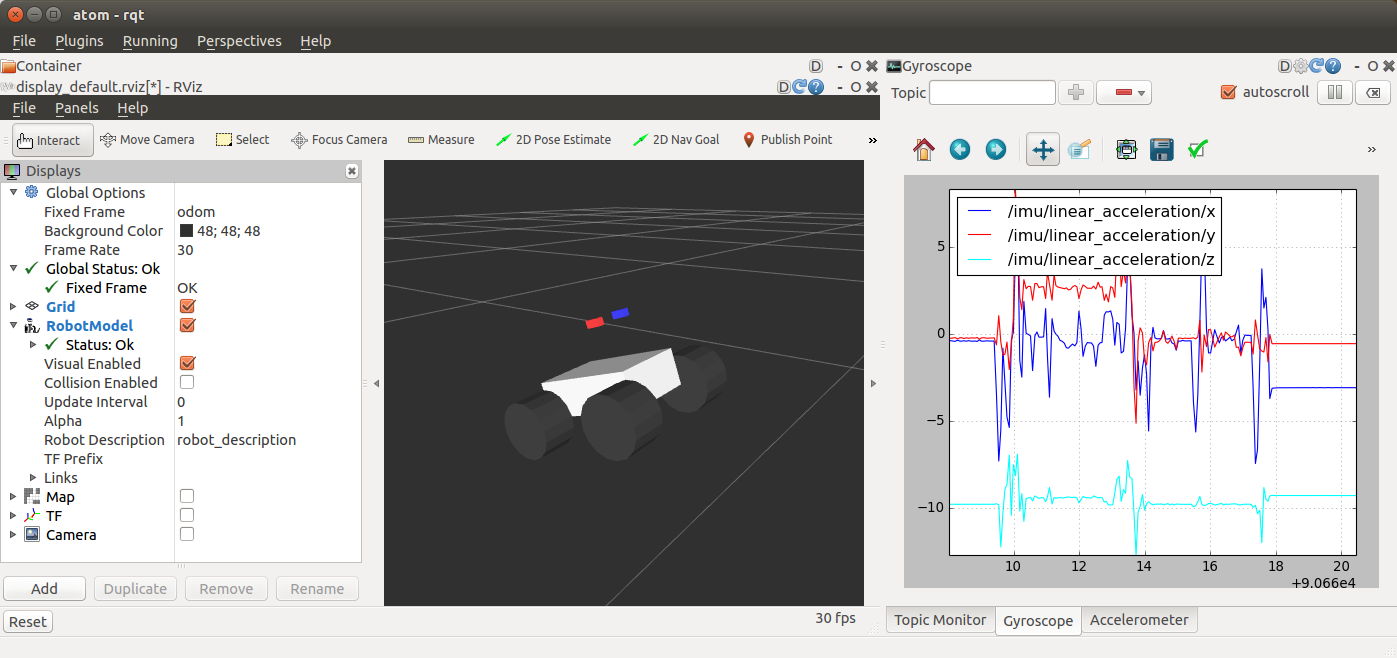
Advanced Teleoperated Office Marauder
Demonstrator of a Raspberry Pi based rover using the Robot Operating System (ROS) framework
Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests
This is really n advanced technoogy and I think would be one of the most finnest choice in comming days you can visit office removals to learn some more interesting things.