 decurus
decurusAfter a lot of back and forth I finally decided on a software structure. At first I wanted a micro controller to fully take care of adjusting the tape speed on receiving midi commands. But that would have ment a lot of fine tuning and less flexibility when it comes to the tonal range. So I decided to use potentiometers that can be used to fine tune pitch and the microcontroller just switches between them to deliver power to the motor. While that means that there is only a limited amount of notes to be played that also means that these can be fine tuned way more precise…. I think. That being said… the entire weekend was spent trying to compile the pico sdk and tinyusb in order to have an rp2040 be detected as a midi device. Never done that before, it was a long journey but I got there in the end.
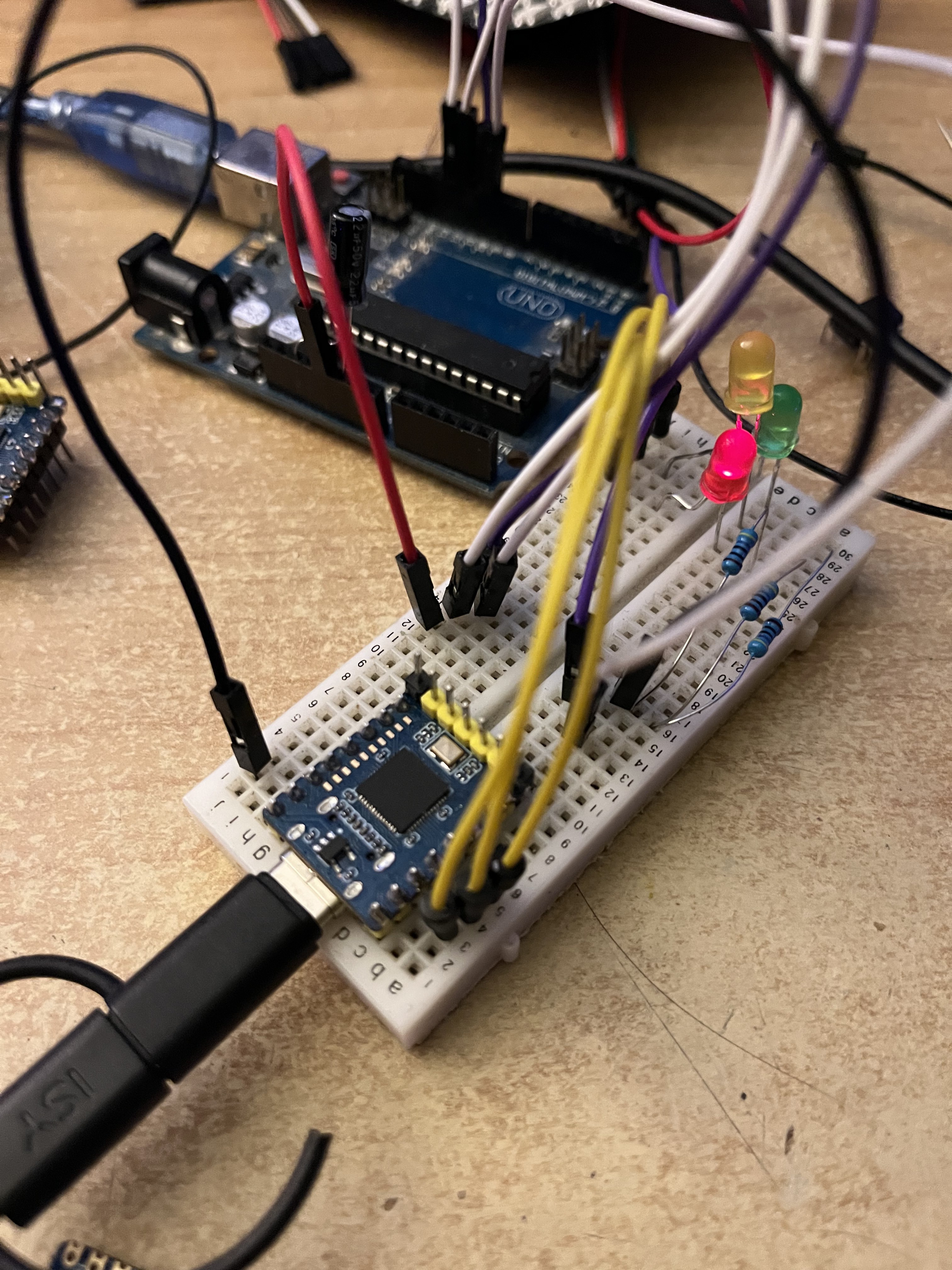
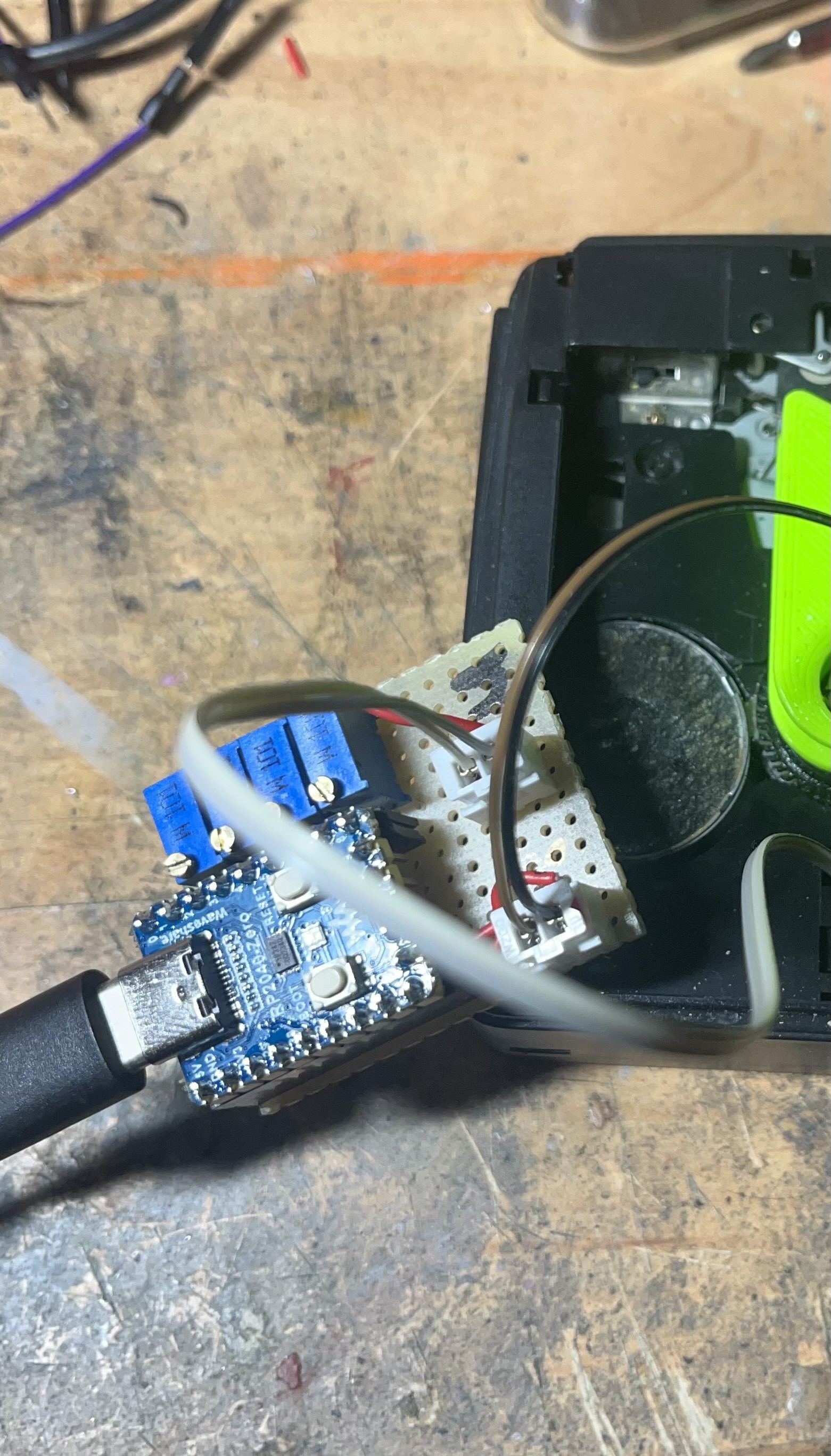
Sigh…. Sometimes you are just blinded by yourself. Of course this approach would not work. The idea was easy enough to implement and everything worked on the breadboard. But for some reason the motor would not do anything. Of course not. The rp2040 goop current is like 8 mA and the motor needs something like 500 mA. The poor gpio pins where completely out of their league. So… next step…. Do it with an h-bridge. This of course means that I do have to implement speed control via pmw, but st least I have an idea of how to adjust the speed without re coding the entire thing every time .
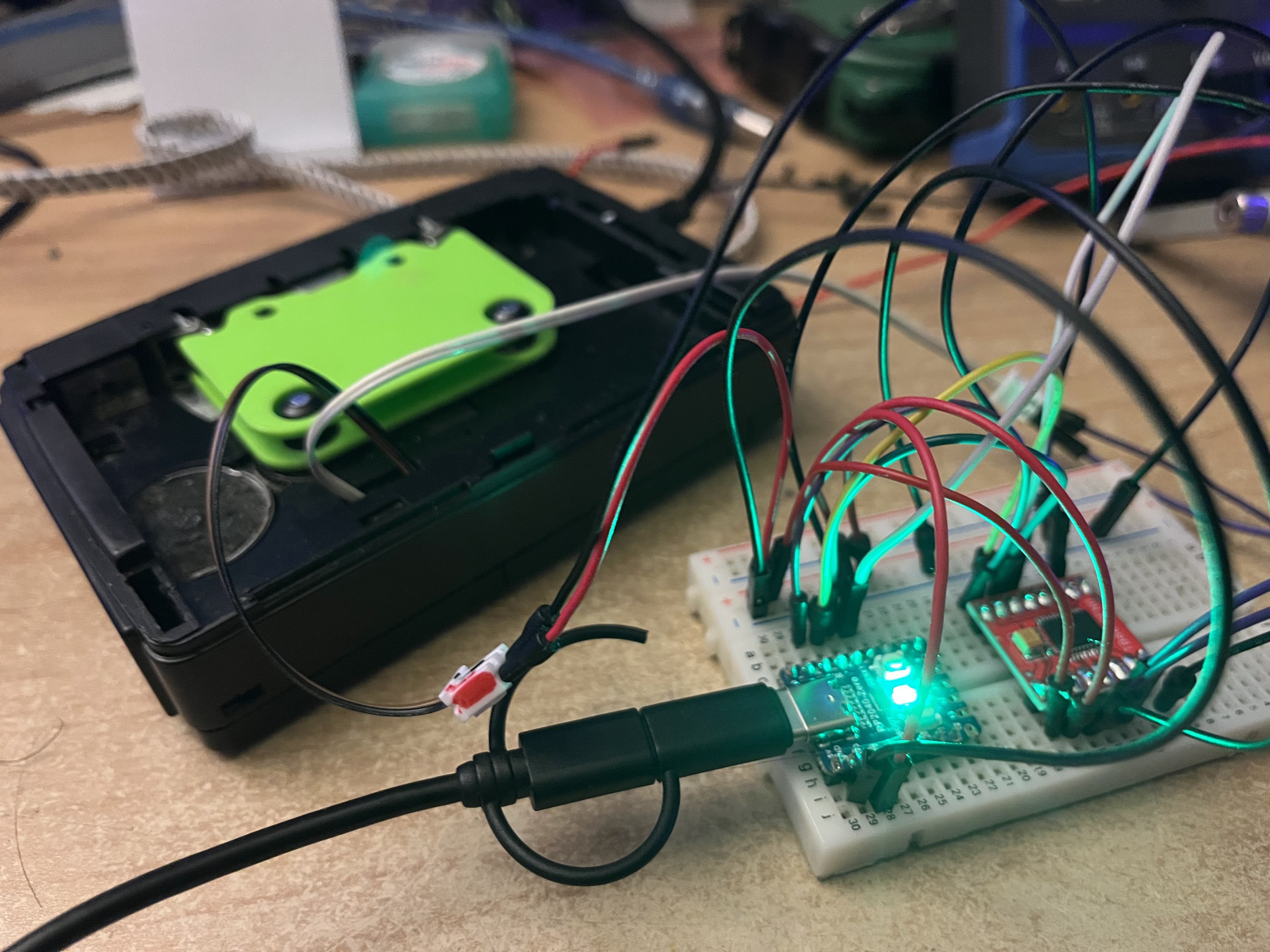
It worked. After a bit of tinkering and coding I finally have everything complete. The rp2040 receives a midi note and starts spinning the motor. While the note is playing, one can use the cc 1 to slow down or speed up the motor. The changes speed will be remembered for the entire time the rp2040 is turned on. Other notes are not effected and can be adjusted individually.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.