 Ethan
EthanI changed how I plan to implement the physical design and electronic hardware.
Hardware: To deal with the clock frequency issues and problems with hardware organization, I divided the micro controllers into a master/slave system. Each motor will have its own Micro controller, FOC board, and a magnetic encoder. These motor micro controllers are all slaves to a command micro controller, which receives inputs from various sensors while sending commands to the slave motor micro controllers.
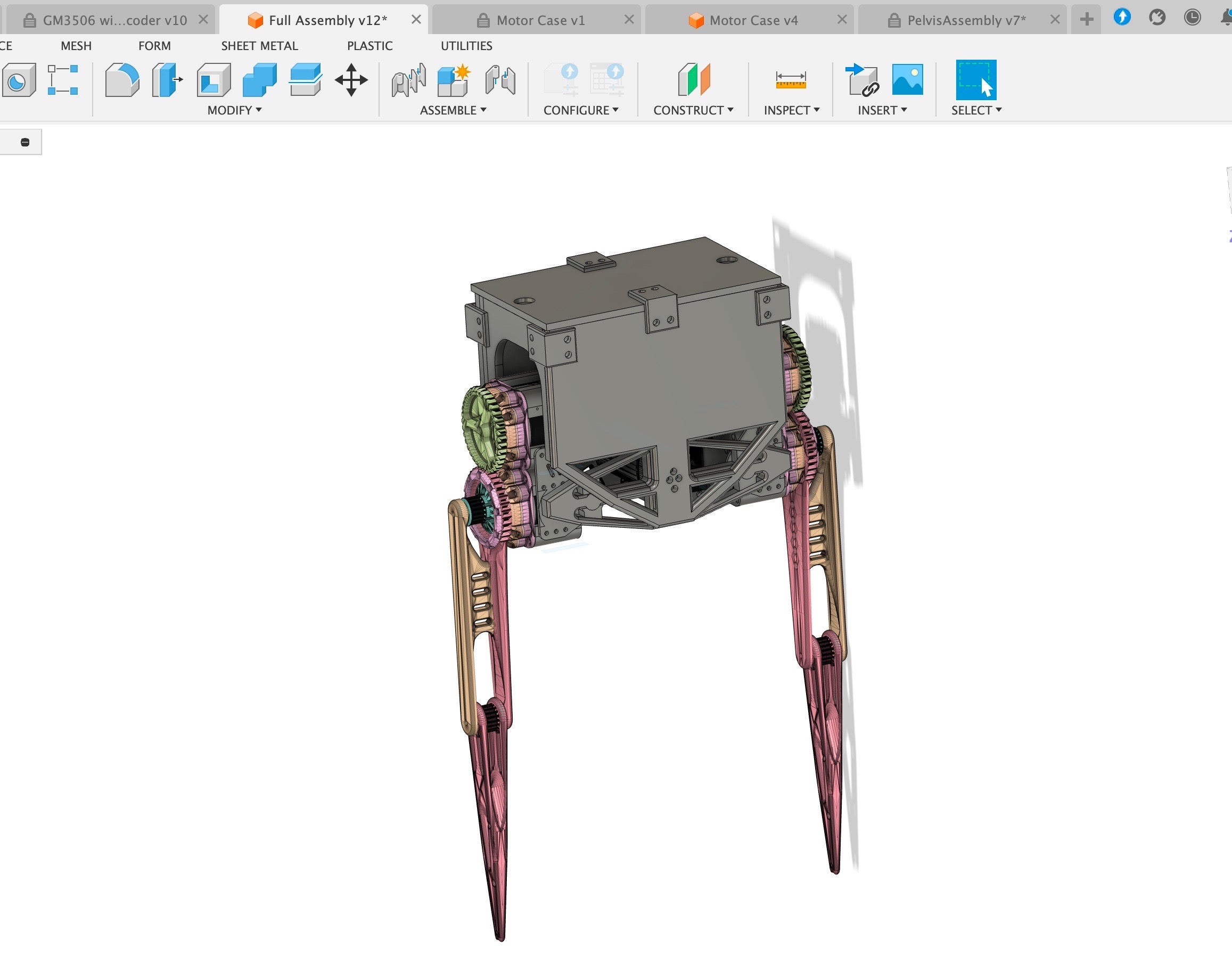
Physical Design: There were a few modifications to the CAD Design. The motor mounts are slightly longer, so that a magnetic encoder in a case fits with the motor. I will likely mount the motor micro controllers on the back of the motor case. I also built a rudimentary case around the robot. This is to hide various wires and components.
Updates on hardware design coming soon!

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.