 Nguyễn Phương Duy
Nguyễn Phương DuyWe set out to find the next suitable robotic design to add to our ecosystem. As CYOCrawler is already a quadruped robot that can also be used as a humanoid robot, we are thinking of adding in wheel-based robot.
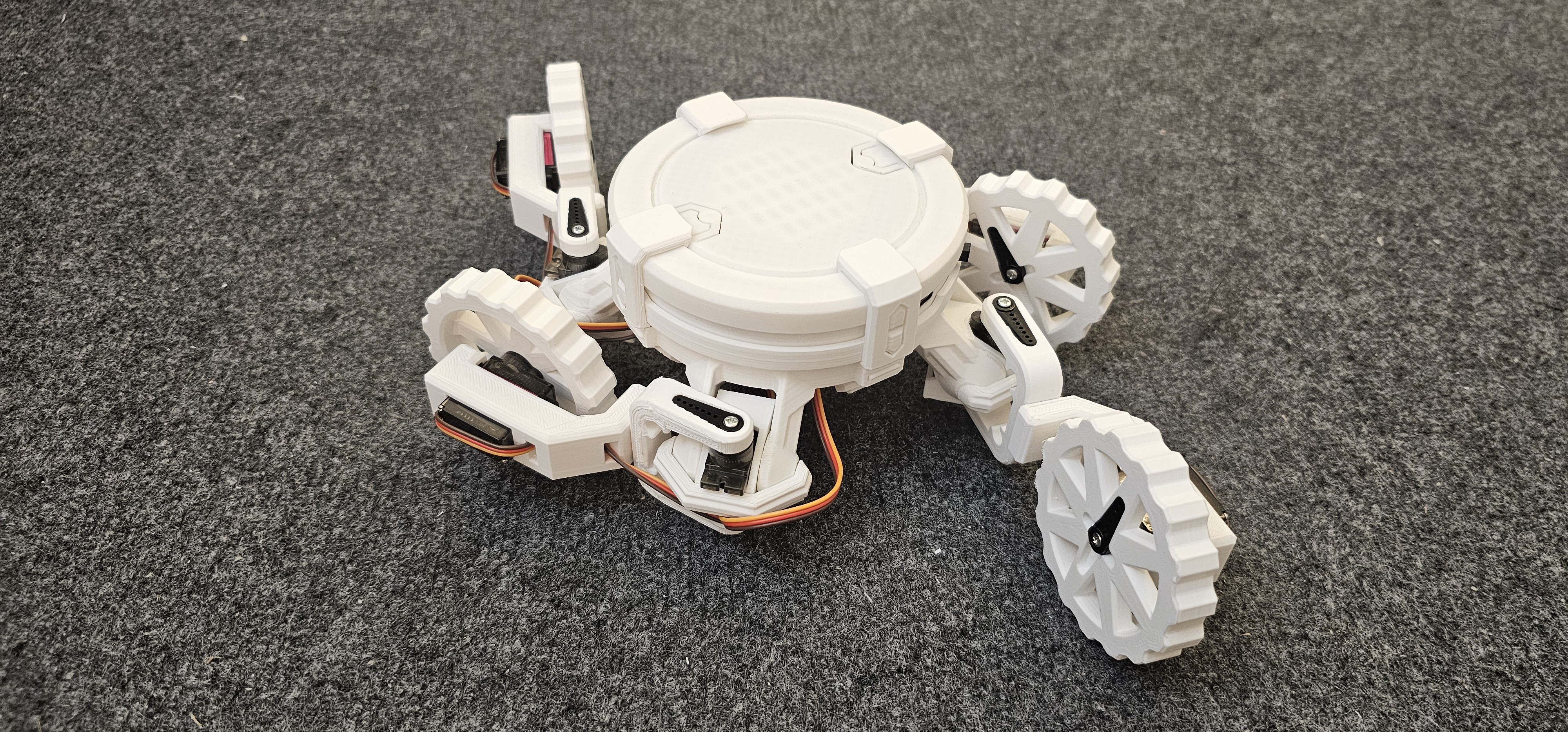
We started out by trying to develop a new car design without changing too much the original design of the quadruped robot. We came up with 2 designs:

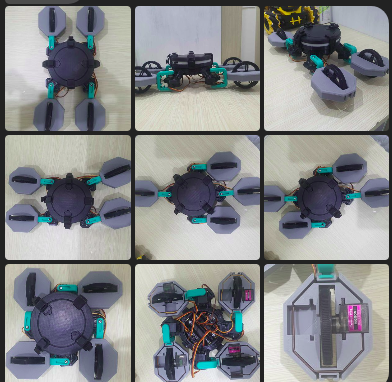
They both share the same design concept: changing only the last joint of CYOCrawler of each leg to include wheels. This design is nice, cause it works and it also allows users to learn and play with wheel-based robots in different configurations. Thanks to this design, the robot can be controlled with steering and throttle separately (by coupling the front legs together and the rear legs together), or all legs be controlled separately to create fancy movements.
Though this design works, we also want to see if we can design something close to a normal car (using Ackermann kinematic structure). We came up with the third design:
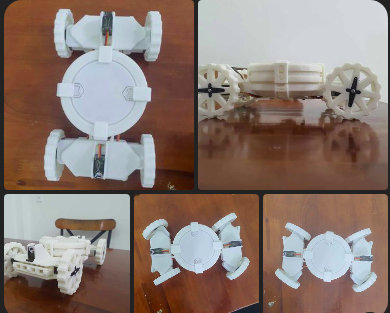
This design already decouples the steering and throttle, and controlling this car is much easier than the previous ones.
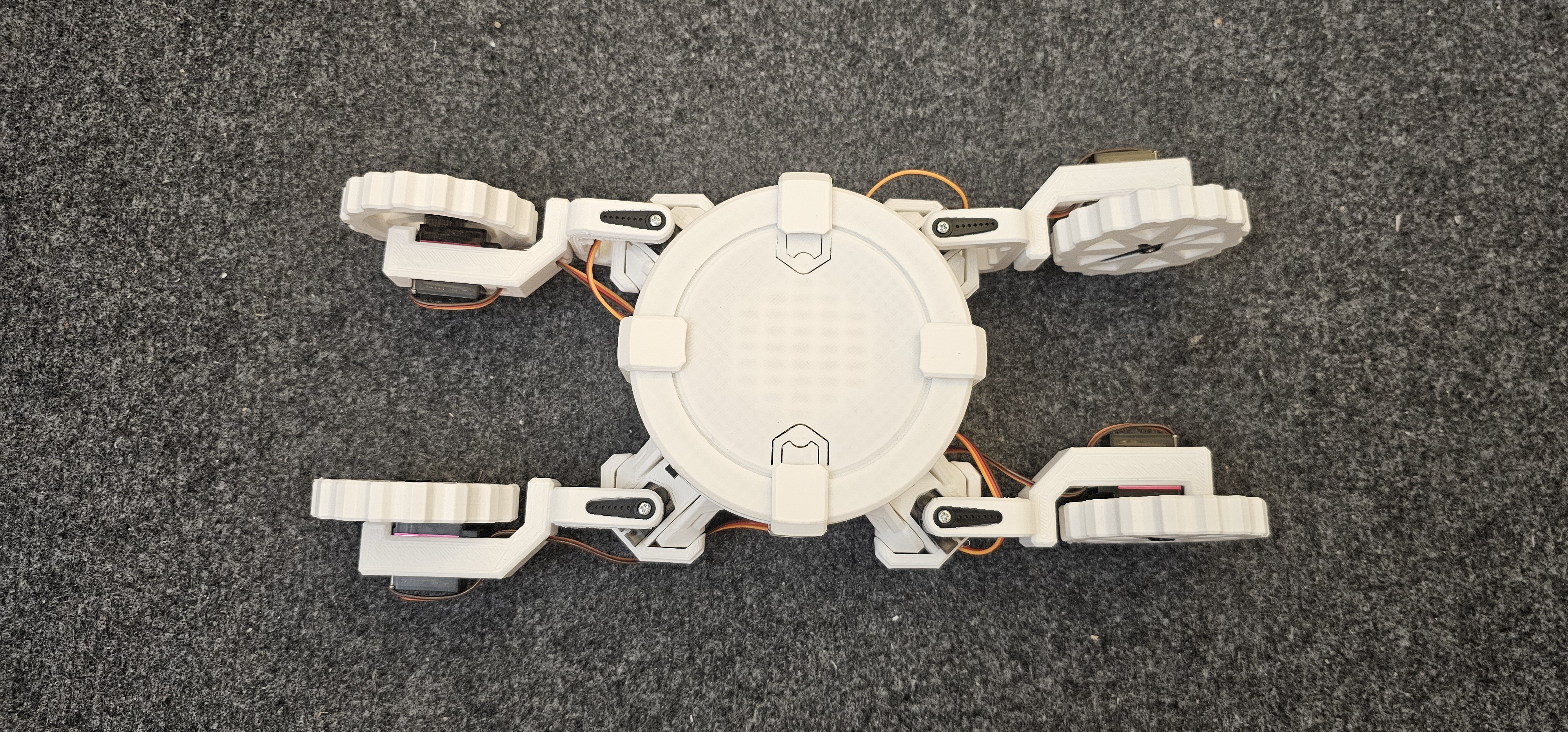
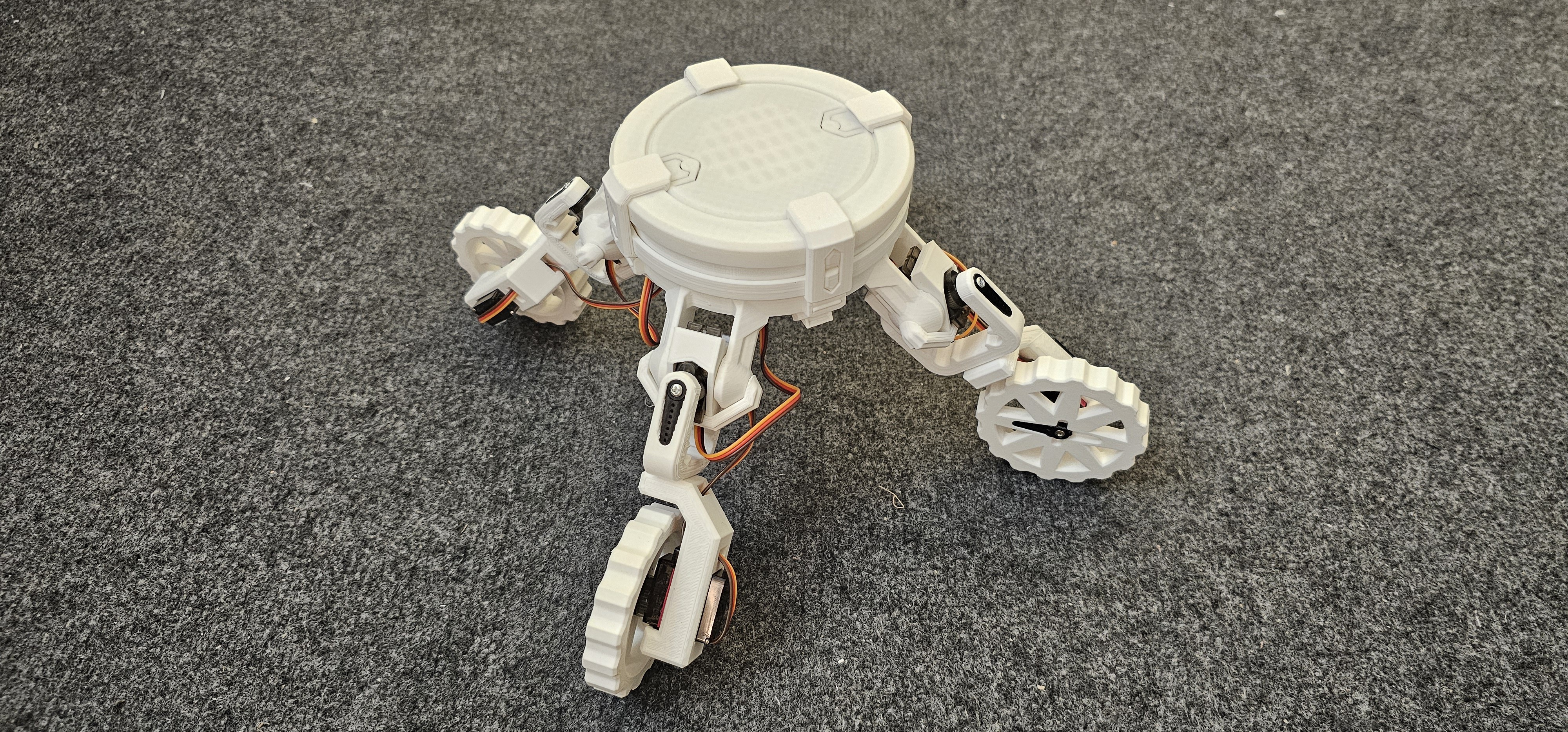
We finally decided to go for the first design, as it works in all cases, and as well we can leverage the hip joint to reconfigure the robot into even more configurations:
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.