 Nguyễn Phương Duy
Nguyễn Phương DuyWe started designing the mechanical board. Since the new wheel-based robot design is also using servo motors, there's no specific hardware and electronics requirement other than the PCA9685, which is already included in the brain. So for both the legged robot and wheel robot, the mechanical board will simply be a pass-through, with headers connecting to the brain when plugged in, and pinouts/headers to attach the servo motors in.
The first design looks like this:
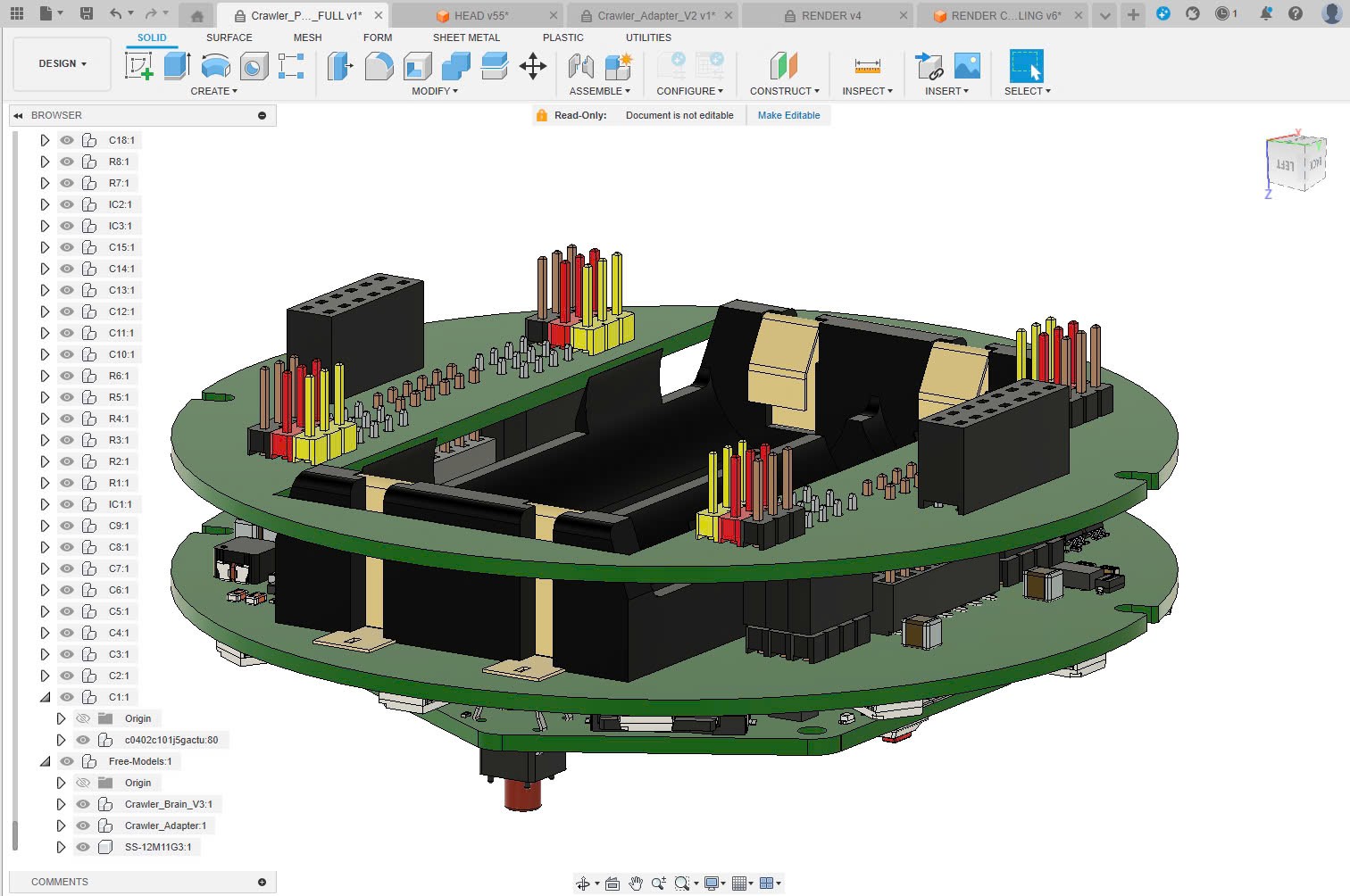
It is a circular PCB with all the headers connecting to the brain. But this design is too big and that it will make the robot's head much taller than before, meaning that if the robot is used in humanoid form, it's going to fall.
The problem here will be to design a mechanical board that can fit the space of the robot's head, while still able to perform the plug-and-play idea.
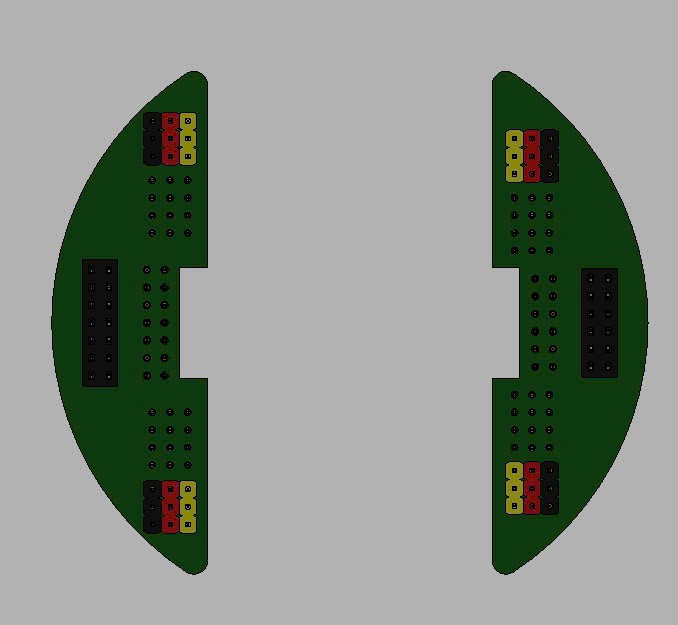
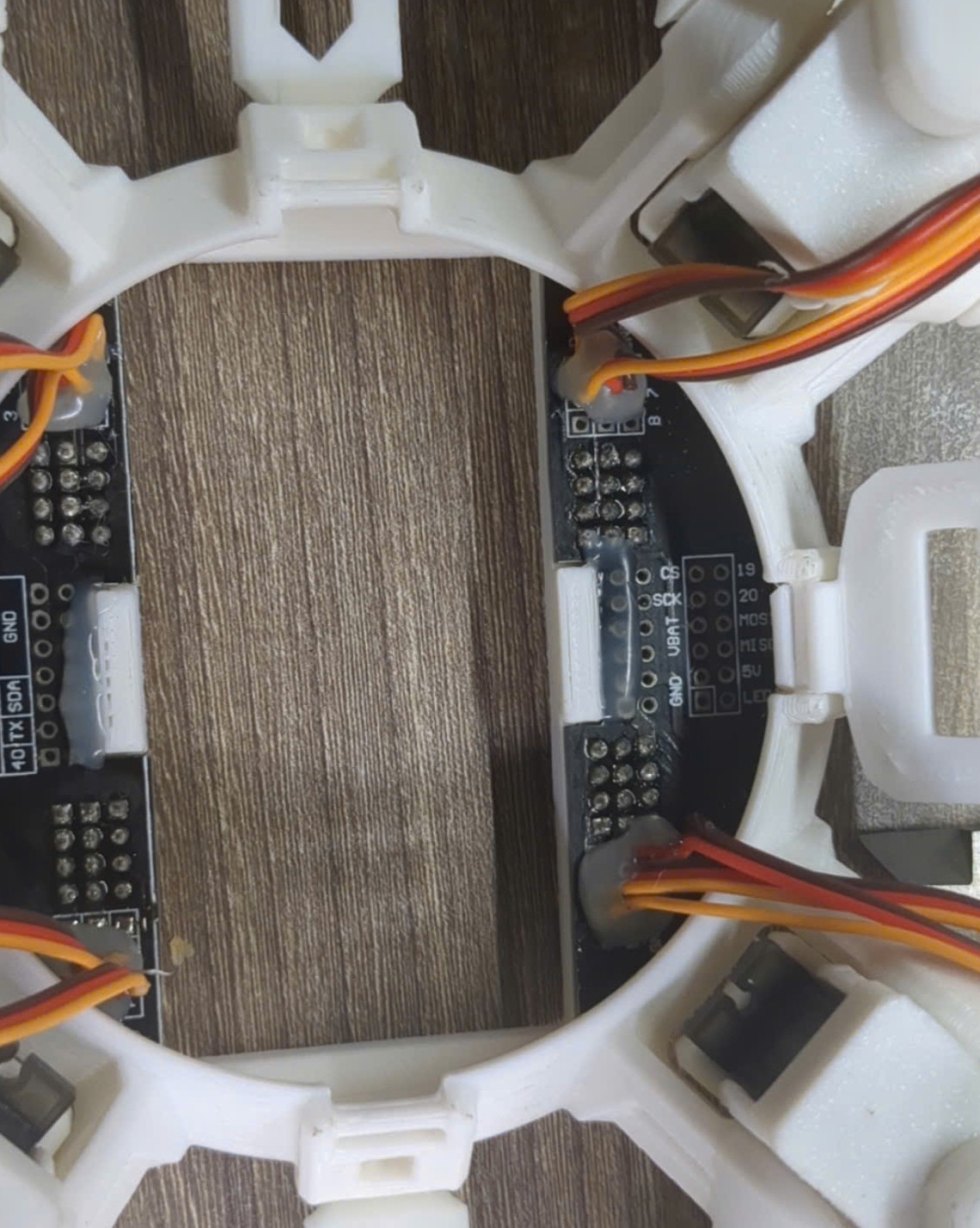
In the second iteration, we cut the circle to 2 smaller PCBs, and redesign the housing structure of the hip/head of the robot, so that everything fits nicely:

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.