Most of the 3D parts have been created and are being verified versus available hardware parts. Here is the rocker and bogie arms. The real arms are hollow but when doing test prints the arms at this scale are too flimsy so the arms are solid with holes drilled through the appropriate sides. The wires will be zip tied to the outside of the arms instead of being routed through hollow arms. Still waiting for the small servos to steer the wheels. Unfortunately the really small servos have an 18 degree step but this should be OK because the only real steering maneuver used on this rover is to angle the wheels in and rotate in place.

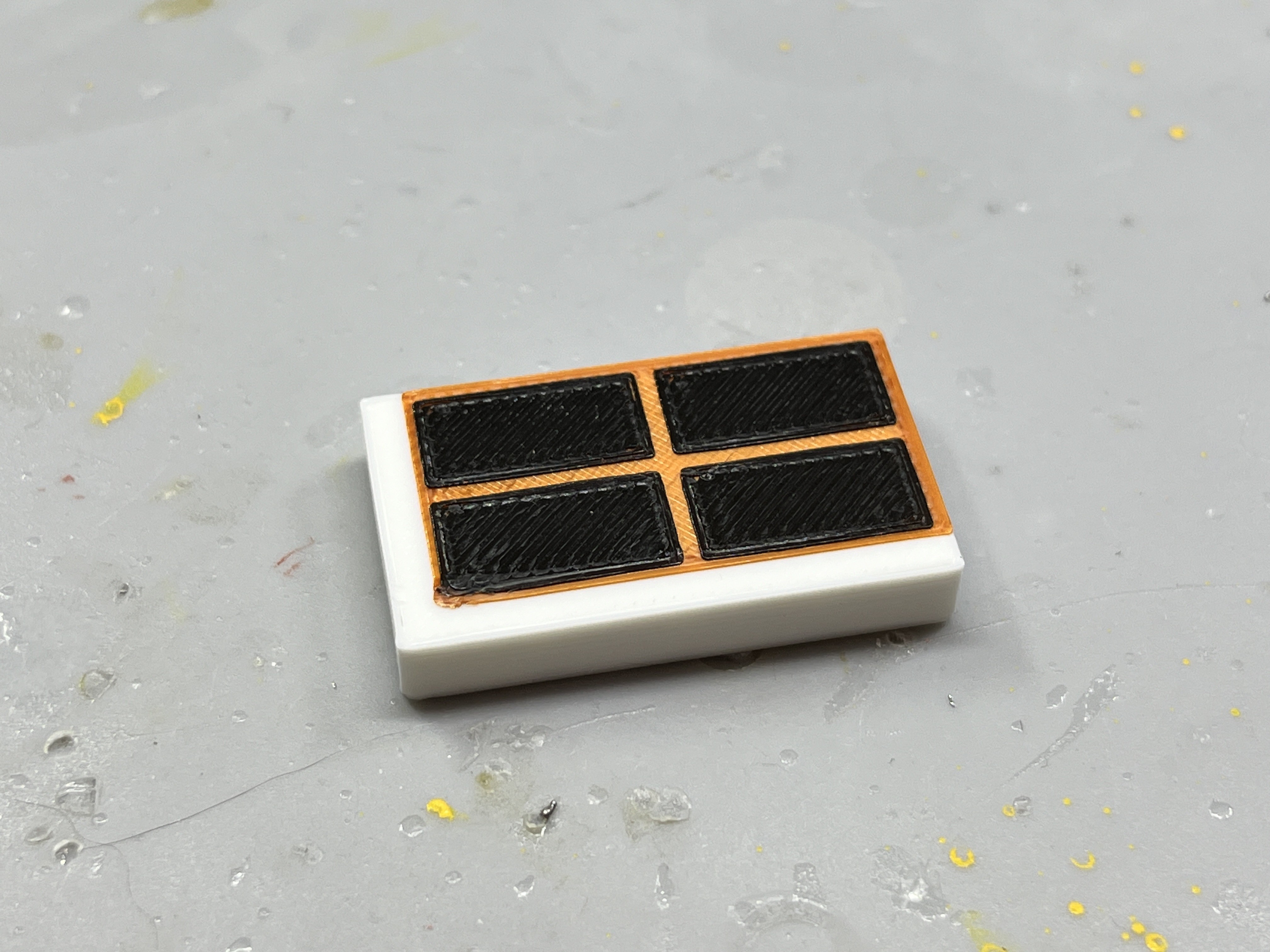
Here is a close up of a test print of the solar panel. The base of the panel is white and 5mm high. Copper filament is then used to print a 0.15mm high layer followed by black 0.15mm high solar panel elements.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.